pose
Pose of platform
Description
pse = pose(ptfm)pse, of the platform
ptfm, in scenario coordinates. The platform must already
exist in the tracking scenario. Add platforms to a scenario using the platform method. The pose is estimated by a pose estimator specified
in the PoseEstimator property of the platform.
pse = pose(___,'CoordinateSystem',coordinate)pse output. You can only
use this syntax when the IsEarthCentered property of the
tracking scenario is set to true.
Examples
Create a tracking scenario with a specified update rate.
scene = trackingScenario('IsEarthCentered',true,'UpdateRate',0.01);
Add an airplane in the scenario. The trajectory of the airplane changes in latitude and altitude.
plane = platform(scene,'Trajectory',geoTrajectory([-12.338,-71.349,10600;42.390,-71.349,0],[0 36000]));Advance the tracking scenario and record the geodetic and Cartesian positions of the plane target.
positions = []; while advance(scene) poseLLA = pose(plane,'CoordinateSystem','Geodetic'); poseCart = pose(plane,'CoordinateSystem','Cartesian'); positions = [positions;poseCart.Position];%#ok<AGROW> Allow the buffer to grow. end
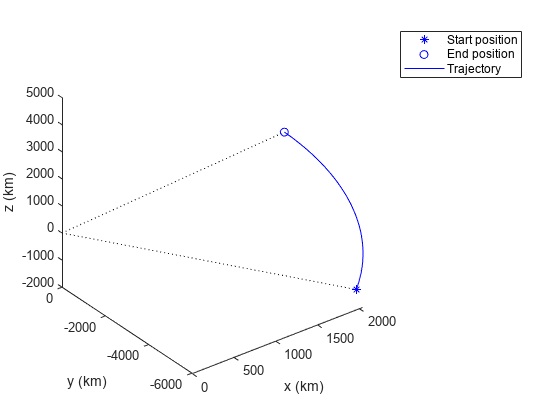
Visualize the trajectory in the ECEF frame.
figure() km = 1000; % Plot the trajectory. plot3(positions(1,1)/km,positions(1,2)/km,positions(1,3)/km, 'b*'); hold on; plot3(positions(end,1)/km,positions(end,2)/km,positions(end,3)/km, 'bo'); plot3(positions(:,1)/km,positions(:,2)/km,positions(:,3)/km,'b'); % Plot the Earth radial lines. plot3([0 positions(1,1)]/km,[0 positions(1,2)]/km,[0 positions(1,3)]/km,'k:'); plot3([0 positions(end,1)]/km,[0 positions(end,2)]/km,[0 positions(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position','Trajectory')
Input Arguments
Output Arguments
Version History
Introduced in R2018b
See Also
detect | emit | targetPoses