waypointInfo
Description
trajectoryInfo = waypointInfo(trajectory)
Examples
Use the minjerkpolytraj function to generate the piecewise polynomial and the time samples for the specified waypoints of a trajectory.
waypoints = [0 20 20 0 0; 0 0 5 5 0; 0 5 10 5 0]; timePoints = cumsum([0 10 1.25*pi 10 1.25*pi]); numSamples = 100; [~,~,~,~,pp,~,tsamples] = minjerkpolytraj(waypoints,timePoints,numSamples);
Use the polynomialTrajectory System object™ to generate a trajectory from the piecewise polynomial that a multirotor must follow. Specify the sample rate of the trajectory and the orientation at each waypoint.
eulerAngles = [0 0 0; 0 0 0; 180 0 0; 180 0 0; 0 0 0]; q = quaternion(eulerAngles,"eulerd","ZYX","frame"); traj = polynomialTrajectory(pp,SampleRate=100,Orientation=q);
Inspect the waypoints, times of arrival, and orientation by using waypointInfo.
waypointInfo(traj)
ans=5×3 table
TimeOfArrival Waypoints Orientation
_____________ ________________________________________ ________________
0 0 0 0 {1×1 quaternion}
10 20 0 5 {1×1 quaternion}
13.927 20 5 10 {1×1 quaternion}
23.927 0 5 5 {1×1 quaternion}
27.854 6.8667e-14 -1.1458e-13 -8.793e-14 {1×1 quaternion}
Obtain pose information one buffer frame at a time.
[pos,orient,vel,acc,angvel] = traj(); i = 1; spf = traj.SamplesPerFrame; while ~isDone(traj) idx = (i+1):(i+spf); [pos(idx,:),orient(idx,:), ... vel(idx,:),acc(idx,:),angvel(idx,:)] = traj(); i = i + spf; end
Get the yaw angle from the orientation.
eulOrientation = quat2eul(orient); yawAngle = eulOrientation(:,1);
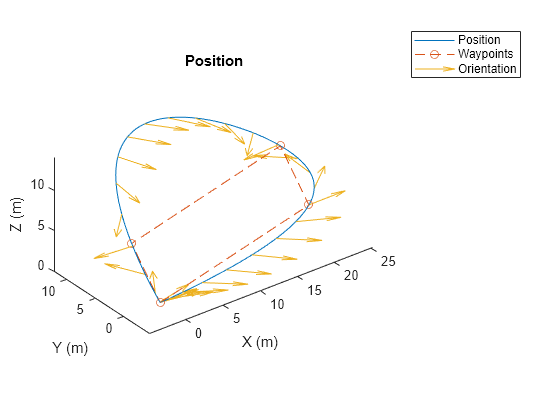
Plot the generated positions and orientations, as well as the specified waypoints.
plot3(pos(:,1),pos(:,2),pos(:,3), ... waypoints(1,:),waypoints(2,:),waypoints(3,:),"--o") hold on % Plot the yaw using quiver. quiverIdx = 1:100:length(pos); quiver3(pos(quiverIdx,1),pos(quiverIdx,2),pos(quiverIdx,3), ... cos(yawAngle(quiverIdx)),sin(yawAngle(quiverIdx)), ... zeros(numel(quiverIdx),1)) title("Position") xlabel("X (m)") ylabel("Y (m)") zlabel("Z (m)") legend({"Position","Waypoints","Orientation"}) axis equal hold off
Use the minsnappolytraj function to generate the piecewise polynomial and the time samples for the specified waypoints of a trajectory.
waypoints = [0 20 20 0 0; 0 0 5 5 0; 0 5 10 5 0]; timePoints = linspace(0,30,5); numSamples = 100; [~,~,~,~,~,pp,~,~] = minsnappolytraj(waypoints,timePoints,numSamples);
Use the polynomialTrajectory System object™ to generate a trajectory from the piecewise polynomial. Specify the sample rate of the trajectory.
traj = polynomialTrajectory(pp,SampleRate=100);
Inspect the waypoints and times of arrival by using waypointInfo.
waypointInfo(traj)
ans=5×2 table
TimeOfArrival Waypoints
_____________ ________________________________________
0 0 0 0
7.5 20 0 5
15 20 5 10
22.5 0 5 5
30 2.4897e-13 -2.7471e-12 -2.6352e-12
Obtain the time of arrival between the second and fourth waypoint. Create timestamps to sample the trajectory.
t0 = traj.TimeOfArrival(2); tf = traj.TimeOfArrival(4); sampleTimes = linspace(t0,tf,1000);
Obtain the position, orientation, velocity, and acceleration information at the sampled timestamps using the lookupPose object function.
[pos,orient,vel,accel,~] = lookupPose(traj,sampleTimes);
Get the yaw angle from the orientation.
eulOrientation = quat2eul(orient); yawAngle = eulOrientation(:,1);
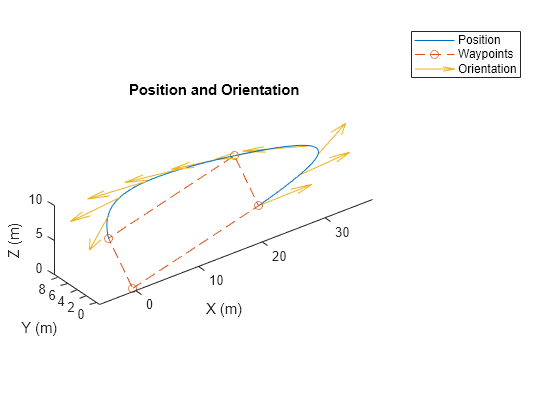
Plot the generated positions and orientations, as well as the specified waypoints.
plot3(pos(:,1),pos(:,2),pos(:,3), ... waypoints(1,:),waypoints(2,:),waypoints(3,:),"--o") hold on % Plot the yaw using quiver. quiverIdx = 1:100:length(pos); quiver3(pos(quiverIdx,1),pos(quiverIdx,2),pos(quiverIdx,3), ... cos(yawAngle(quiverIdx)),sin(yawAngle(quiverIdx)), ... zeros(numel(quiverIdx),1)) title("Position and Orientation") xlabel("X (m)") ylabel("Y (m)") zlabel("Z (m)") legend({"Position","Waypoints","Orientation"}) axis equal hold off
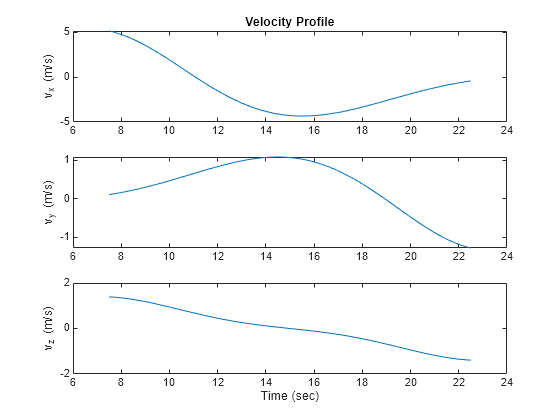
Plot the velocity profiles.
figure subplot(3,1,1) plot(sampleTimes,vel(:,1)) title("Velocity Profile") ylabel("v_x (m/s)") subplot(3,1,2) plot(sampleTimes,vel(:,2)) ylabel("v_y (m/s)") subplot(3,1,3) plot(sampleTimes,vel(:,3)) ylabel("v_z (m/s)") xlabel("Time (sec)")
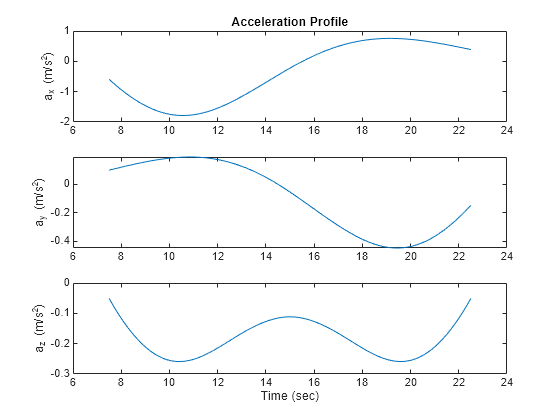
Plot the acceleration profiles.
figure subplot(3,1,1) plot(sampleTimes,accel(:,1)) title("Acceleration Profile") ylabel("a_x (m/s^2)") subplot(3,1,2) plot(sampleTimes,accel(:,2)) ylabel("a_y (m/s^2)") subplot(3,1,3) plot(sampleTimes,accel(:,3)) ylabel("a_z (m/s^2)") xlabel("Time (sec)")
Input Arguments
Output Arguments
Version History
Introduced in R2023a