Fuzzy Logic Controller
Evaluate fuzzy inference system
Libraries:
Fuzzy Logic Toolbox
Description
The Fuzzy Logic Controller block implements a fuzzy inference system (FIS) in Simulink®. You specify the FIS to evaluate using the FIS name parameter.
For more information on fuzzy inference, see Fuzzy Inference Process.
To display the fuzzy inference process during simulation, use the Fuzzy Logic Controller with Ruleviewer block.
Examples
The simulateTipper model computes tip values for specified food and service ratings using the Fuzzy Logic Controller block, which is configured to use the FIS stored in the tipper.fis file. For more information on how to create this FIS, see Build Fuzzy Systems Using Fuzzy Logic Designer.
model = "simulateTipper";
open_system(model)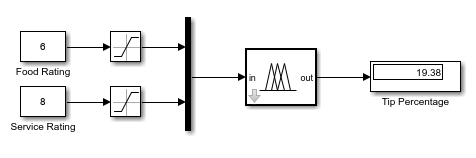
In this model:
You specify the food and service ratings using the
Food RatingandService Ratingblocks, respectively.The input signals are constrained to the expected input range of the FIS, which is [0,10] for both signals.
The constrained input signals are combined using a Mux block.
The Fuzzy Logic Controller block computes the tip output value based on the input signals.
Extended Examples
Simulate Fuzzy Inference System
Once you have created a fuzzy inference system using Fuzzy Logic Designer or at the command line, you can simulate the system in Simulink.

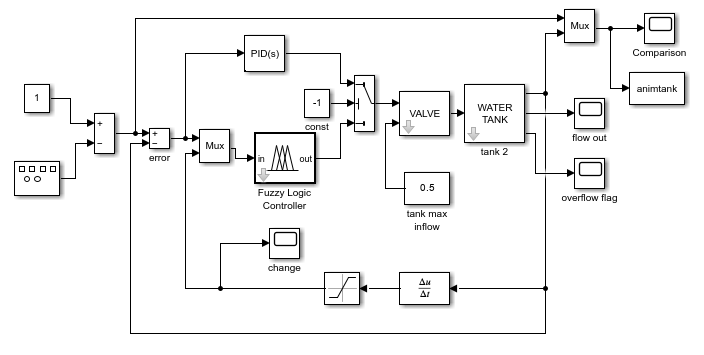
Water Level Control in a Tank
Implement a water level controller using the Fuzzy Logic Controller block in Simulink.
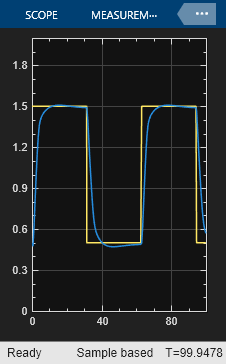
Temperature Control in a Shower
Implement a water temperature controller using the Fuzzy Logic Controller block in Simulink.
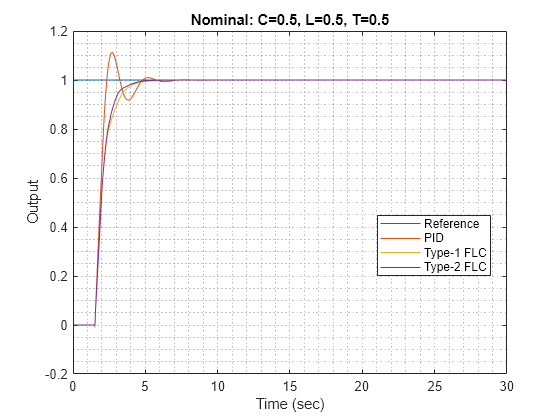
Fuzzy PID Control with Type-2 FIS
Create a type-2 fuzzy logic PID controller and compare its performance with a type-1 fuzzy PID controller and a conventional PID controller.
Design Fuzzy Inference System in Simulink
You can modify your FIS design by opening Fuzzy Logic Designer directly from the Fuzzy Logic Controller block.
- Since R2025a
Ports
Input
For a single-input fuzzy inference system, the input is a scalar signal. For a multi-input fuzzy system, combine the inputs into a vector signal using blocks such as:
Mux (Simulink)
Vector Concatenate (Simulink)
Bus Creator (Simulink)
Output
For a single-output FIS, the output is a scalar signal. For a multi-output FIS, the output is a vector signal. To split system outputs into scalar signals, use the Demux (Simulink) block.
Fuzzified input values, obtained by evaluating the input membership functions of each rule at the current input values.
For a type-1 FIS, fi is an NR-by-NU matrix signal, where NR is the number of FIS rules. Element (i,j) of fi is the value of the input membership function for the jth input in the ith rule.
For a type-2 FIS, fi is an NR-by-(2*NU) matrix signal. The first NU columns contain the fuzzified values of the upper membership function for each rule, and the last NU columns contain the fuzzified values from the lower membership functions.
For more information on fuzzifying input values, see Fuzzify Inputs.
Dependencies
To enable this port, select the Fuzzified inputs (fi) parameter.
Rule firing strengths, obtained by evaluating the antecedent of each rule; that is, applying the fuzzy operator to the values of the fuzzified inputs.
For a type-1 FIS, rfs is a column vector signal of length NR, where NR is the number of rules, and element i is the firing strength of the ith rule.
For a type-2 FIS, rfs is an NR-by-2 matrix signal. The first column contains the rule firing strengths generated using upper membership functions, and the second column contains the rule firing strengths generated using lower membership functions.
For more information on applying fuzzy operators, see Apply Fuzzy Operator.
Dependencies
To enable this port, select the Rule firing strengths (rfs) parameter.
Rule outputs, obtained by applying the rule firing strengths to the output membership functions using the implication method specified in the FIS.
For a type-1 Mamdani FIS, ro is an NS-by-(NRNY) matrix signal, where NR is the number of rules, NY is the number of outputs, and NS is the number of sample points used for evaluating output variable ranges. Each column of ro contains the output fuzzy set for one rule. The first NR columns contain the rule outputs for the first output variable, the next NR columns correspond to the second output variable, and so on.
For a type-2 Mamdani FIS, ro is an NS-by-(2*NR*NY) matrix signal. The first NR*NY columns contain the rule outputs generated using upper membership functions, and the last NR*NY columns contain the rule outputs generated using lower membership functions.
For a type-1 Sugeno system, each rule output is a scalar value. In this case, ro is an NR-by-NY matrix signal. Element (j,k) of ro is the value of the kth output variable for the jth rule.
For a type-2 Sugeno system, ro is an NR-by-(3*NY) array. The first NY columns contain the rule output levels. The next NY columns contain the corresponding rule firing strengths generated using upper membership functions. The last NY columns contain the rule firing strengths generated using lower membership functions. For example, in a three-output system, columns 4 and 7 contain the firing strengths for the output levels in column 1.
For more information on fuzzy implication, see Apply Implication Method.
Dependencies
To enable this port, select the Rule outputs (ro) parameter.
To specify NS, use the Number of samples for output discretization parameter.
Aggregate output for each output variable, obtained by combining the corresponding outputs from all the rules using the aggregation method specified in the FIS.
For a type-1 Mamdani fuzzy inference system, the aggregate result for each output variable is a fuzzy set. In this case, ao is as an NS-by-NY matrix signal, where NY is the number of outputs and NS is the number of sample points used for evaluating output variable ranges. Each column of ao contains the aggregate fuzzy set for one output variable.
For a type-2 Mamdani FIS, the aggregate result for each output variable is a fuzzy set. In this case, ao is as an NS-by-(2*NY) matrix signal. The first NY columns contain the aggregated outputs generated using upper membership functions, and the last NY columns contain the aggregated outputs generated using lower membership functions.
For a type-1 Sugeno system, the aggregate result for each output variable is a scalar value. In this case, ao is a row vector of length NY, where element k is the sum of the rule outputs for the kth output variable.
For a type-2 Sugeno system, ao is an NR-by-(3*NY) array. ro contains the same data as ao with the columns sorted based on the output levels. For example, in a three-output system, when the output levels in column 1 are sorted, the corresponding firing strengths in columns 4 and 7 are adjusted accordingly.
For more information on fuzzy aggregation, see Aggregate All Outputs.
Dependencies
To enable this port, select the Aggregated outputs (ao) parameter.
To specify NS, use the Number of samples for output discretization parameter.
Parameters
To edit block parameters interactively, use the Property Inspector. From the Simulink Toolstrip, on the Simulation tab, in the Prepare gallery, select Property Inspector.
General
Fuzzy inference system to evaluate, specified as one of the following:
mamfisorsugfisobject — Specify the name of a type-1 FIS object in the MATLAB® workspace.mamfistype2orsugfistype2object — Specify the name of a type-2 FIS object in the MATLAB workspace.Name of a FIS file (
*.fis) in the current working folder or on the MATLAB path. Including the file extension in the file name is optional. Specify the filename in quotes.Name of a MAT file (
*.mat) in the current working folder or on the MATLAB path. The MAT file must contain only one FIS object. Including the file extension in the file name is optional. Specify the filename in quotes. (since R2024a)
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | FIS |
| Values: | '"tipper.fis"' (default) | variable name in quotes | file name in quotes |
Open Fuzzy Logic Designer to view and modify the FIS design. You can then update the block to use the modified FIS design. For more information, see Design Fuzzy Inference System in Simulink.
Number of samples for discretizing the range of FIS output variables, specified as an integer greater than 1. This value corresponds to the number of points in the output fuzzy set for each rule.
To reduce memory usage while evaluating Mamdani FISs, specify a lower number of samples. Doing so sacrifices the accuracy of the defuzzified output value. Specifying a low number of samples can make the output area for defuzzification zero. In this case, the defuzzified output value is the midpoint of the output variable range.
Note
The block ignores this parameter when evaluating Sugeno FISs.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | OutputSampleNumber |
| Values: | "101" (default) | integer greater than 1 in quotes |
Signal data type, specified as one of the following:
double— Double-precision signalssingle— Single-precision signalsfixdt(1,16,0)— Fixed-point signals with binary point scalingfixdt(1,16,2^0,0)— Fixed-point signals with slope and bias scalingExpression — Expression that evaluates to one of these data types
For fixed-point data types, you can configure the signedness, word length, and scaling parameters using the Data Type Assistant. For more information, see Specifying a Fixed-Point Data Type (Simulink).
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | DataType |
| Values: | "double" (default) | "single" | "fixdt(1,16,0)" | "fixdt(1,16,2^0,0)" |
Since R2025a
To reduce the processing time for the controller, you can represent your FIS as a lookup table.
The block divides the input range of each FIS input into equally sized regions based on the number of breakpoints, which you specify using the Number of input breakpoints parameter.
For each input combination, the block calculates a corresponding FIS output. During evaluation, the controller uses these precomputed outputs instead of performing the fuzzy inference process.
Programmatic Use
To set the block parameter value
programmatically, use the set_param (Simulink) function.
| Parameter: | UseLookupTable |
| Values: | "off" (default) | "on" |
Since R2025a
Number of lookup table breakpoints, specified as a positive integer. Increasing the number of breakpoints improves the accuracy of the lookup table while increasing its memory requirements.
Dependencies
To enable this parameter, select the Implement FIS as lookup table parameter.
Programmatic Use
To set the block parameter value
programmatically, use the set_param (Simulink) function.
| Parameter: | NumBreakpoints |
| Values: | "10" (default) | positive integer in quotes |
Enable fi output port for accessing intermediate fuzzified input data.
Dependencies
Intermediate inference outputs are not available when you select Implement FIS as lookup table. (since R2025a)
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | FuzzifiedInputs |
| Values: | "off" (default) | "on" |
Enable rfs output port for accessing intermediate rule firing strength data.
Dependencies
Intermediate inference outputs are not available when you select Implement FIS as lookup table. (since R2025a)
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | RuleFiringStrengths |
| Values: | "off" (default) | "on" |
Enable ro output port for accessing intermediate rule output data.
Dependencies
Intermediate inference outputs are not available when you select Implement FIS as lookup table. (since R2025a)
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | RuleOutputs |
| Values: | "off" (default) | "on" |
Enable ao output port for accessing intermediate aggregate output data.
Dependencies
Intermediate inference outputs are not available when you select Implement FIS as lookup table. (since R2025a)
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | AggregatedOutputs |
| Values: | "off" (default) | "on" |
Simulation mode, specified as one of these values:
Interpreted execution— Simulate fuzzy systems using precompiled MEX files forsingleanddoubledata types. Using this option reduces the initial compilation time of the model.Code generation— Simulate fuzzy system without precompiled MEX files. Use this option when simulating fuzzy systems for code generation applications.
For fixed-point data types, the Fuzzy Logic Controller block always
simulates using Code generation mode.
Dependencies
Setting the simulation mode is not supported when you select Implement FIS as lookup table.
Programmatic Use
To set the block parameter value
programmatically, use the set_param (Simulink) function.
| Parameter: | SimulateUsing |
| Values: | "Interpreted execution" (default) | "Code generation" |
Diagnostics
Diagnostic message behavior when an input is out of range, specified as one of the following:
warning— Report the diagnostic message as a warning.error— Report the diagnostic message as an error.none— Do not report the diagnostic message.
When an input value is out of range, corresponding rules in the fuzzy system can have unexpected firing strengths.
Dependencies
Diagnostic messages are provided only when the Simulate using parameter is
Interpreted execution.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | OutOfRangeInputValueMessage |
| Values: | "warning" (default) | "error" | "none" |
Diagnostic message behavior when no rules fire for a given output variable, specified as one of the following:
warning— Report the diagnostic message as a warning.error— Report the diagnostic message as an error.none— Do not report the diagnostic message.
When No rule fired is warning or none and no rules fire for a given output, the defuzzified output value is set to its mean range value.
Dependencies
Diagnostic messages are provided only when the Simulate using parameter is
Interpreted execution.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | NoRuleFiredMessage |
| Values: | "warning" (default) | "error" | "none" |
Diagnostic message behavior when an output fuzzy set is empty, specified as one of the following:
warning— Report the diagnostic message as a warning.error— Report the diagnostic message as an error.none— Do not report the diagnostic message.
When Empty output fuzzy set is warning or none and an output fuzzy set is empty, the defuzzified value for the corresponding output is set to its mean range value.
Dependencies
This diagnostic message applies to Mamdani systems only.
Diagnostic messages are provided only when the Simulate using parameter is
Interpreted execution.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | EmptyOutputFuzzySetMessage |
| Values: | "warning" (default) | "error" | "none" |
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
PLC Code Generation
Generate Structured Text code using Simulink® PLC Coder™.
Fixed-Point Conversion
Design and simulate fixed-point systems using Fixed-Point Designer™.
Version History
Introduced before R2006aYou can now open Fuzzy Logic Designer from the Fuzzy Logic Controller block by clicking Design. The app opens and imports the FIS specified by the FIS name parameter.
You can represent your FIS as a lookup table, which reduces processing time. To use a lookup table, select the Implement FIS as lookup table parameter. The block divides the input range of each FIS input into equally sized regions based on the number of breakpoints, which you specify using the Number of input breakpoints parameter.
This block no longer supports fuzzy inference system structures. Use mamfis and sugfis objects
instead. To convert existing fuzzy inference system structures to objects, use the convertfis function.
You can specify the FIS to evaluate using a MAT file in the current working folder or on the MATLAB path. The MAT file must contain only one FIS object.
You can simulate a type-2 fuzzy inference system using this block. To do so, specify the
FIS name parameter as a mamfistype2 or
sugfistype2 object.
Support for fuzzy inference systems structures will be removed in a future release. This change was announced in R2018b. Using fuzzy inference system structures with this block issues a warning starting in R2019b.
Using the Fuzzy Logic Controller block, you can access intermediate fuzzy inference results by enabling the following output ports.
fi— Fuzzified input valuesrfs— Rule firing strengthsro— Rule outputsao— Aggregated membership function for each output variable
The Fuzzy Logic Controller block supports double-precision, single-precision, and fixed-point data types.
When generating code using Simulink Coder™, the Fuzzy Logic Controller block supports code generation for fuzzy systems that use:
Single-precision data.
Fixed-point data. To generate code for fixed-point data, you need Fixed-Point Designer™ software.
Custom membership functions and custom inference functions. For more information on specifying custom functions for a fuzzy system, see Build Fuzzy Systems Using Custom Functions.
The Fuzzy Logic Controller block supports generation of IEC 61131-3 Structured Text for PLC deployment using Simulink PLC Coder™ software.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
选择网站
选择网站以获取翻译的可用内容,以及查看当地活动和优惠。根据您的位置,我们建议您选择:。
您也可以从以下列表中选择网站:
如何获得最佳网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他 MathWorks 国家/地区网站并未针对您所在位置的访问进行优化。
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)