非线性灰盒模型
如果您了解系统的物理特性,并且可以使用具有未知参数的常微分方程或差分方程 (ODE) 来表示系统,则可以使用 System Identification Toolbox™ 命令执行灰盒建模。灰盒模型 ODE 明确指定模型的数学结构,包括参数之间的耦合。当您了解变量之间的关系、模型行为的约束或表示系统动态特性的显式方程时,灰盒建模是很有用的。
您可以使用 idnlgrey 对象表示非线性灰盒模型,这需要您编写一个函数将动态特性描述为一组一阶微分方程。有关详细信息,请参阅Estimate Nonlinear Grey-Box Models。
函数
主题
- Linear and Nonlinear Grey-Box Modeling
If you understand the physics of your system, you can estimate linear or nonlinear grey-box models.
- Estimate Nonlinear Grey-Box Models
How to define and estimate nonlinear grey-box models at the command line.
- Creating IDNLGREY Model Files
This example shows how to write ODE files for nonlinear grey-box models as MATLAB® and C MEX files.
- Estimate Coefficients of ODEs to Fit Given Solution
Estimate model parameters using linear and nonlinear grey-box modeling.
精选示例

车辆动力学系统建模
此示例展示了车辆动力学的非线性灰盒建模。

Modeling an Aerodynamic Body
The grey-box modeling of a large and complex nonlinear system.
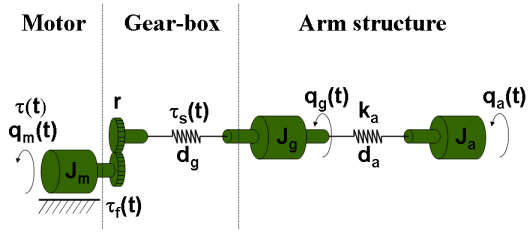
Modeling an Industrial Robot Arm
Grey-box modeling of the dynamics of an industrial robot arm.
Represent Nonlinear Dynamics Using MATLAB File for Grey-Box Estimation
Construct, estimate, and analyze nonlinear grey-box models.
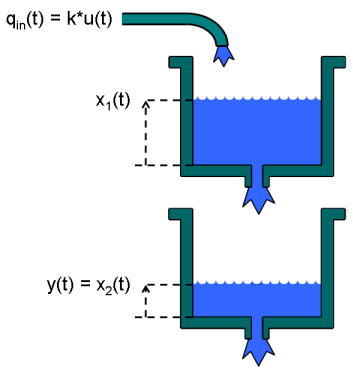
Two Tank System: C MEX File Modeling of Time-Continuous SISO System
Perform IDNLGREY modeling based on C MEX model files.
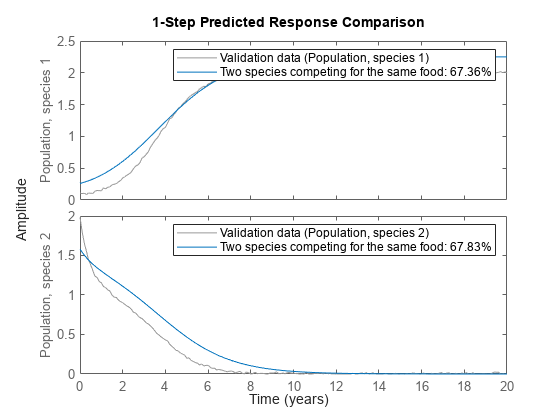
Three Ecological Population Systems: MATLAB and C MEX File Modeling of Time-Series
Create nonlinear grey box time series models.
Narendra-Li Benchmark System: Nonlinear Grey Box Modeling of a Discrete-Time System
Identify the parameters of a complex yet artificial nonlinear discrete-time system with one input and one output.
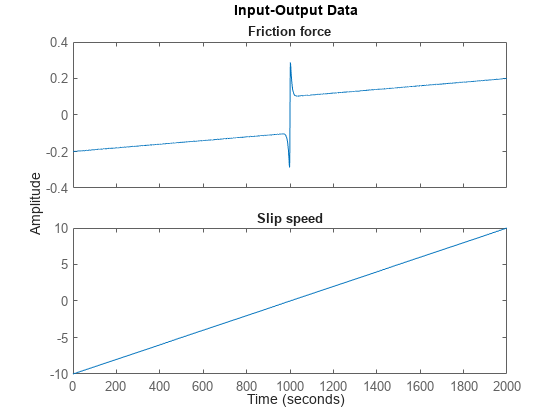
Friction Modeling: MATLAB File Modeling of Static SISO System
Grey-box modeling of a static single-input, single-output system using a MATLAB function as the ODE file.

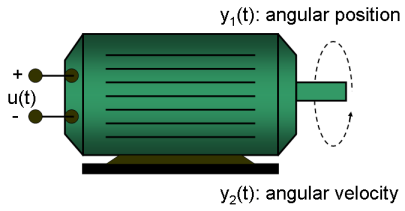
Signal Transmission System: C MEX File Modeling Using Optional Input Arguments
Provide optional input arguments to IDNLGREY models.
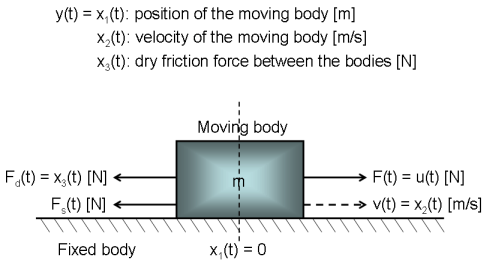
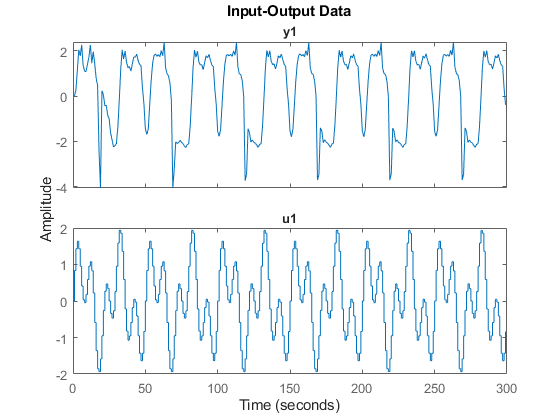
Dry Friction Between Two Bodies: Parameter Estimation Using Multiple Experiment Data
Estimate parameters of a nonlinear grey box model using multiple experiment data.
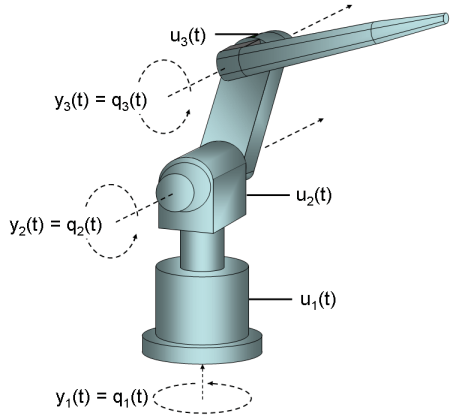
Industrial Three-Degrees-of-Freedom Robot: C MEX File Modeling of MIMO System Using Vector/Matrix Parameters
Design C-MEX model files that involve scalar, vector, and matrix parameters.
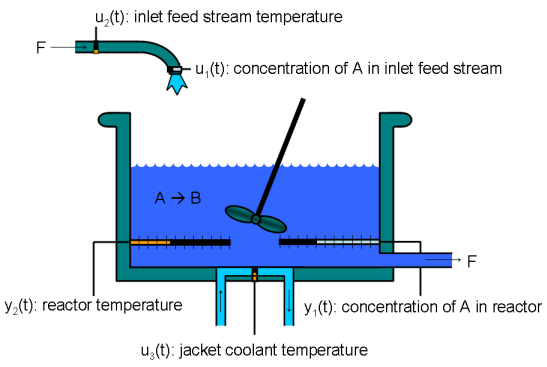
Non-Adiabatic Continuous Stirred Tank Reactor: MATLAB File Modeling with Simulations in Simulink
Include and simulate an IDNLGREY model in Simulink®.
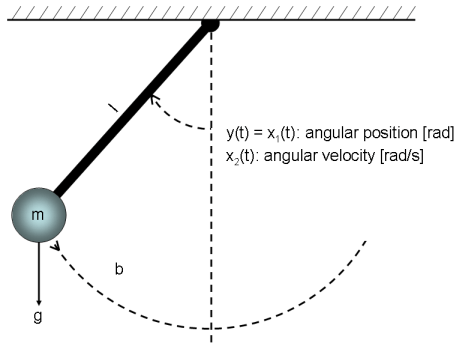
Classical Pendulum: Some Algorithm-Related Issues
How the estimation algorithm choices may impact the results for a nonlinear grey box model estimation.