pem
预测误差最小化用于优化线性与非线性模型
说明
示例
使用 n4sid 进行离散时间状态空间建模,该方法采用子空间法。
加载数据并提取前 300 个点作为估计数据。
load sdata7 tt7; tt7e = tt7(1:300,:);
估计模型 init_sys,将 'Focus' 选项设置为 'simulation'。
opt = n4sidOptions('Focus','simulation'); init_sys = n4sid(tt7e,4,opt);
显示估计拟合。
init_sys.Report.Fit.FitPercent
ans = 73.8490
使用 pem 来提高贴合度。
sys = pem(tt7e,init_sys);
分析得到的结果。
compare(tt7e,sys,init_sys);
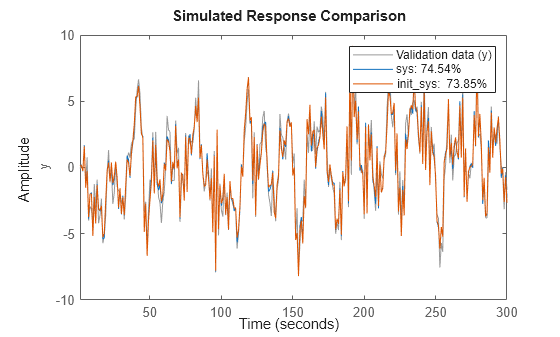
使用 pem 可改善对估计数据的拟合效果。
估计非线性灰箱模型的参数以拟合直流电机数据。
加载实验数据,并指定信号属性,例如起始时间和单位。
load('dcmotordata'); data = iddata(y, u, 0.1); data.Tstart = 0; data.TimeUnit = 's';
配置非线性灰箱模型 (idnlgrey)。
在本示例中,请使用 dcmotor_m.m 文件。要在 MATLAB® 命令提示符下查看此文件,请输入 edit dcmotor_m.m。
file_name = 'dcmotor_m'; order = [2 1 2]; parameters = [1;0.28]; initial_states = [0;0]; Ts = 0; init_sys = idnlgrey(file_name,order,parameters,initial_states,Ts); init_sys.TimeUnit = 's'; setinit(init_sys,'Fixed',{false false});
init_sys 是一个非线性灰盒模型,其结构由 dcmotor_m.m 描述。该模型具有一个输入、两个输出和两个状态,具体由 order 定义。
setinit(init_sys,'Fixed',{false false}) 指定 init_sys 的初始状态为自由估计参数。
估计模型参数和初始状态。
sys = pem(data,init_sys);
sys 是 idnlgrey 模型,该模型封装了估计参数及其协方差。
分析估计结果。
compare(data,sys,init_sys);

sys 模型对估计数据的拟合度为 98.34%。
创建流程模型结构并更新其参数值,以最小化预测误差。
初始化过程模型的系数。
init_sys = idproc('P2UDZ');
init_sys.Kp = 10;
init_sys.Tw = 0.4;
init_sys.Zeta = 0.5;
init_sys.Td = 0.25;
init_sys.Tz = 0.01;init_sys 的 Kp、Tw、Zeta、Td 和 Tz 系数均配置了其初始猜测值。
使用 init_sys 配置基于测量数据的预测误差最小化模型估计。由于 init_sys 是 idproc 模型,请使用 procestOptions 创建选项集。
load iddata1 z1; opt = procestOptions('Display','on','SearchMethod','lm'); sys = pem(z1,init_sys,opt);
Process Model Identification
Estimation data: Time domain data z1
Data has 1 outputs, 1 inputs and 300 samples.
Model Type:
{'P2DUZ'}
Algorithm: Levenberg-Marquardt search
<br>
------------------------------------------------------------------------------------------
<br>
Norm of First-order Improvement (%) <br> Iteration Cost step optimality Expected Achieved Bisections <br>------------------------------------------------------------------------------------------
0 29.7194 - 260 2.57 - -
1 28.6801 6 98.9 2.57 3.5 0
2 8.38196 4.91 42.2 2.72 70.8 0
3 8.2138 0.704 41.3 1.37 2.01 12
4 8.00237 0.528 48.3 2.89 2.57 9
5 7.65577 0.588 73.1 2.02 4.33 9
6 6.851 0.809 196 4.51 10.5 9
7 5.72335 1.08 459 4.59 16.5 8
8 3.3434 2.11 1.63e+03 11.4 41.6 7
9 1.80724 0.701 504 14.2 45.9 0
10 1.6812 0.122 12 4.24 6.97 0
11 1.68092 0.014 1.11 0.309 0.0168 0
12 1.68092 0.00179 0.0215 0.3 0.000101 0
13 1.68092 0.000112 0.00634 0.3 8.26e-07 0
14 1.68092 1.36e-05 0.000382 0.3 7.62e-09 0
15 1.68092 1.18e-06 5.01e-05 0.3 7.28e-11 0
16 1.68092 1.23e-07 4.29e-06 0.3 7.13e-13 0
17 1.68092 1.17e-08 4.56e-07 0.3 1.32e-14 0
------------------------------------------------------------------------------------------
Termination condition: No improvement along the search direction with line search..
Number of iterations: 18, Number of function evaluations: 115
Status: Estimated using PEM
Fit to estimation data: 70.57%, FPE: 1.7379
检查模型拟合度。
sys.Report.Fit.FitPercent
ans =
70.567
sys 模型对测量数据的拟合度为 70.63%。
输入参数
输出参量
算法
PEM 采用数值优化方法来最小化预测误差的加权范数 cost function,对于标量输出,其定义如下:
其中 e(t) 是模型测量输出与预测输出之间的差值。对于线性模型,误差定义为:
其中 e(t) 是向量,而成本函数 是标量值。下标 N 表明成本函数是数据样本数量的函数,且随着 N 值增大而变得更精确。对于多输出模型,上述方程更为复杂。更多信息请参阅第 7 章系统辨识:用户理论,第二版,作者:伦纳特·吕恩,普伦蒂斯厅出版社,1999 年。
替代功能
通过使用针对不同模型结构的专用估计命令,您可获得与 pem 相同的估计结果。例如,使用 ssest(data,init_sys) 进行状态空间模型的估计。
版本历史记录
在 R2006a 之前推出