ssest
Estimate state-space model using time-domain or frequency-domain data
Syntax
Description
Estimate State-Space Model
sys = ssest(tt,nx)sys of order
nx, using all the input and output signals in the timetable
tt.
You can use this syntax for SISO and MISO systems. The function assumes that the last variable in the timetable is the single output signal.
sys is an idss model of the following form:
A, B, C,
D, and K are state-space matrices.
u(t) is the input,
y(t) is the output,
e(t) is the disturbance, and
x(t) is the vector of nx
states.
All entries of A, B, C, and
K are free estimable parameters by default. D is
fixed to zero by default, meaning that there is no feedthrough, except for static systems
(nx = 0).
To estimate discrete-time models, set 'Ts' to the model sample
time using name-value syntax.
To estimate MIMO models, use name-value syntax to specify the input and output
channels using 'InputName' and 'OutputName' to
the corresponding timetable variable names.
You can also use 'InputName' and
'OutputName' to specify specific channels when you do not want to
use all the available channels in tt.
sys = ssest(u,y,nx,'Ts',Ts)u,y and the
model sample time Ts.
The software assumes that the data sample time is Ts seconds.
You can use this syntax for SISO, MISO, and MIMO systems.
Estimating a continuous-time model with u,y
by not specifying Ts is not recommended. The software assumes that
the data sample time is 1 second. You cannot change this sample time. If you want to
estimate a continuous-time model from data with a sample time other than 1 second, you
must first convert your matrix data to a timetable or iddata object. For
an example of this conversion, see Convert SISO Matrix Data to Timetable or Convert MIMO Matrix Data to Timetable for Continuous-Time Model Estimation.
sys = ssest(data,nx)data.
Use this syntax especially when you want to estimate a state-space model using frequency-domain or frequency-response data, or when you want to take advantage of the additional information, such as intersample behavior, data sample time, or experiment labeling, that data objects provide.
Estimate Time Series State-Space Model
sys = ssest(tt,nx)sys to fit the data in the
timetable tt. tt must contain a single numeric
variable. The function interprets the timetable variable data as a time series, which has
no inputs and a single output.
For a time series model, the sys
idss model has the following form:
sys = ssest(tt,nx,'OutputName',outputVariables,'InputName',[])outputVariables. The function
interprets the specified variables as a multivariate time series. If you specify all the
variables in tt in 'OutputName', you can omit
the specification of 'InputName'.
Specify Additional Model Options
sys = ssest(___,Name,Value)
For example, specify a discrete-time system from matrix data that has a sample time of
0.1 using sys = ssest(um,ym,np,'Ts',0.1). Specify input and output
signal variable names that correspond with the variables to use for MIMO timetable data
using sys =
ssest(data,nx,'InputName',["u1","u4"],'OutputName',["y1","y3"]). Use the
'Form', 'Feedthrough', and
'DisturbanceModel' name-value arguments to modify the default
behavior of the A, B, C,
D, and K matrices.
You can use this syntax with any of the previous input-argument combinations.
Configure Initial Parameters
Specify Additional Estimation Options
Examples
Estimate a state-space model and compare its response with the measured output.
Load the input/output data, which is stored in a timetable.
load sdata1 tt1
Estimate a fourth-order state-space model.
nx = 4; sys = ssest(tt1,nx);
Compare the simulated model response with the measured output.
compare(tt1,sys)
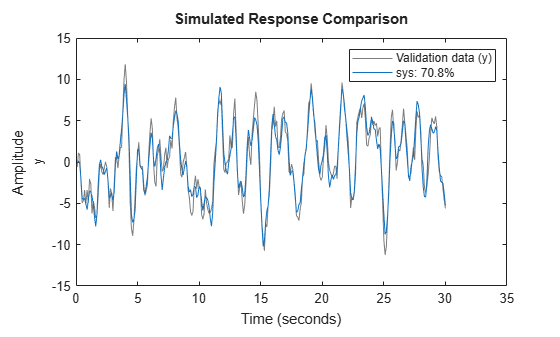
The plot shows that the fit percentage between the simulated model and the estimation data is greater than 70%.
You can view more information about the estimation by exploring the idss property sys.Report.
sys.Report
ans =
Status: 'Estimated using SSEST with prediction focus'
Method: 'SSEST'
InitialState: 'zero'
N4Weight: 'CVA'
N4Horizon: [6 10 10]
Fit: [1×1 struct]
Parameters: [1×1 struct]
OptionsUsed: [1×1 idoptions.ssest]
RandState: []
DataUsed: [1×1 struct]
Termination: [1×1 struct]
For example, find out more information about the termination conditions.
sys.Report.Termination
ans = struct with fields:
WhyStop: 'No improvement along the search direction with line search.'
Iterations: 7
FirstOrderOptimality: 85.9759
FcnCount: 123
UpdateNorm: 9.6201
LastImprovement: 0
The report includes information on the number of iterations and the reason the estimation stopped iterating.
Load the input/output data in matrices umat1 and
ymat1, as well as the sample time Ts. These
matrices store the same estimation data as the timetable data used to estimate a
fourth-order model in State-Space Model.
load sdata1 umat1 ymat1 Ts
Determine the optimal model order by specifying argument nx as a
range from 1:10.
nx = 1:10;
sys = ssest(umat1,ymat1,nx,'Ts',Ts);An automatically generated plot shows the Hankel singular values for models of the
orders specified by nx.
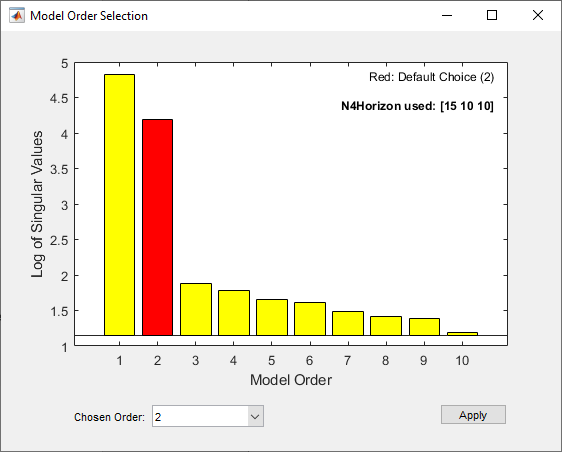
States with relatively small Hankel singular values can be safely discarded. The
suggested default order choice is 2.
Select the model order in the Chosen Order list and click
Apply. sys is a discrete-time model.
Load time-domain system response data in the matrix pair umat7 and ymat7.
load sdata7 umat7 ymat7 Ts;
Identify a fourth-order state-space model of the data. Specify a known delay of 2 seconds for the first input and 0 seconds for the second input.
nx = 4; sys = ssest(umat7(1:300,:),ymat7(1:300,:),nx,'Ts',Ts,'InputDelay',[2;0]);
Modify the canonical form of the A, B, and C matrices, include a feedthrough term in the D matrix, and eliminate disturbance-model estimation in the K matrix.
Load input-output data and estimate a fourth-order system using the ssest default options.
load iddata1 z1 sys1 = ssest(z1,4);
Specify the companion form and compare the A matrix with the default A matrix.
sys2 = ssest(z1,4,'Form','companion'); A1 = sys1.A
A1 = 4×4
-0.5155 3.8483 -0.6657 -0.2666
-5.8665 -2.7285 1.0649 1.4694
0.4487 0.9308 -0.6235 -18.8148
-0.4192 -0.5595 16.0688 0.5399
A2 = sys2.A
A2 = 4×4
103 ×
0 0 0 -7.1122
0.0010 0 0 -0.9547
0 0.0010 0 -0.3263
0 0 0.0010 -0.0033
Include a feedthrough term and compare D matrices.
sys3 = ssest(z1,4,'Feedthrough',1);
D1 = sys1.DD1 = 0
D3 = sys3.D
D3 = 0.0339
Eliminate disturbance modeling and compare K matrices.
sys4 = ssest(z1,4,'DisturbanceModel','none'); K1 = sys1.K
K1 = 4×1
0.0520
-0.0973
-0.0151
0.0270
K4 = sys4.K
K4 = 4×1
0
0
0
0
Specify ssest initial states as independent estimation parameters.
ssest can handle initial states using one of several methods. By default, ssest chooses the method automatically based on your estimation data. You can choose the method yourself by modifying the option set using ssestOptions.
Load the input/output data tt1 and estimate a second-order state-space model sys using the default options. Use the syntax that returns initial states x0.
load sdata1 tt1 [sys,x0] = ssest(tt1,2); x0
x0 = 2×1
0
0
By default, the estimation is performed using the 'auto' setting for InitialState. Find out which method ssest applied by reviewing the value of InitialState in sys.Report.
sys.Report.InitialState
ans = 'zero'
The software applied the 'zero' method, meaning that the software set the initial states to zero instead of estimating them. This selection is consistent with the 0 values returned for x0.
Specify that ssest estimate the initial states instead as independent parameters using the 'estimate' setting. Use ssestOptions to create a modified option set and specify that option set to estimate a new model.
opt = ssestOptions('InitialState','estimate'); [sys1,x0] = ssest(tt1,2,opt); x0
x0 = 2×1
0.0068
0.0052
x0 now has estimated parameters with nonzero values.
Obtain a regularized fifth-order state-space model for a second-order system from a narrow bandwidth signal.
Load estimation data.
load regularizationExampleData eData;
Create the transfer function model used for generating the estimation data (true system).
trueSys = idtf([0.02008 0.04017 0.02008],[1 -1.561 0.6414],1);
Estimate an unregularized state-space model.
opt = ssestOptions('SearchMethod','lm'); m = ssest(eData,5,'form','modal','DisturbanceModel','none','Ts',eData.Ts,opt);
Estimate a regularized state-space model.
opt.Regularization.Lambda = 10; mr = ssest(eData,5,'form','modal','DisturbanceModel','none','Ts',eData.Ts,opt);
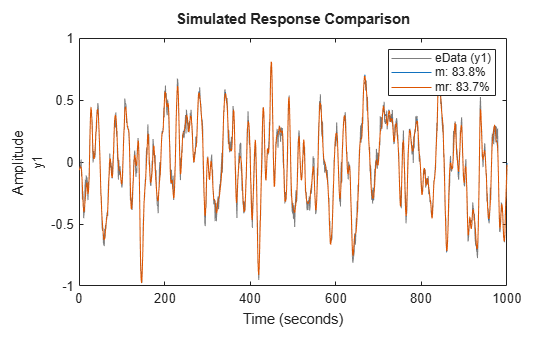
Compare the model outputs with the estimation data.
compare(eData,m,mr);
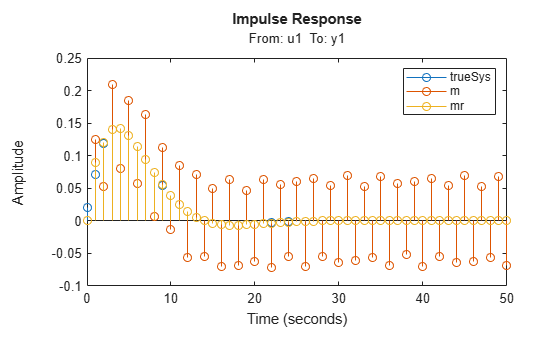
Compare the model impulse responses.
impulse(trueSys,m,mr,50); legend('trueSys','m','mr');
Configure the parameter constraints and initial values for state-space model estimation.
Create an idss model to specify the initial parameterization for estimation.
A = blkdiag([-0.1 0.4; -0.4 -0.1],[-1 5; -5 -1]); B = [1; zeros(3,1)]; C = [1 1 1 1]; D = 0; K = zeros(4,1); x0 = [0.1 0.1 0.1 0.1]; Ts = 0; init_sys = idss(A,B,C,D,K,x0,Ts);
Setting all entries of K to 0 creates an idss model with no state disturbance element.
Use the Structure property to fix the values of some of the model parameters. Configure the model so that B and K are fixed, and only the nonzero entries of A are estimable.
init_sys.Structure.A.Free = (A~=0); init_sys.Structure.B.Free = false; init_sys.Structure.K.Free = false;
The entries in init_sys.Structure.A.Free determine whether the corresponding entries in init_sys.A are free (true) or fixed (false).
Load the measured data and estimate a state-space model using the parameter constraints and initial values specified by init_sys.
load sdata2 tt2; sys = ssest(tt2,init_sys);
The estimated parameters of sys satisfy the constraints specified by init_sys.
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
ssest initializes the parameter estimates using either a noniterative
subspace approach or an iterative rational function estimation approach. It then refines the
parameter values using the prediction error minimization approach. For more information, see
pem and ssestOptions.
References
[1] Ljung, L. System Identification: Theory for the User, Second Edition. Upper Saddle River, NJ: Prentice Hall PTR, 1999.
Version History
Introduced in R2012aSee Also
Functions
ssestOptions|ssregest|idss|n4sid|tfest|procest|polyest|iddata|idfrd|canon|idgrey|pem
Live Editor Tasks
Topics
- Estimate State-Space Models at the Command Line
- Estimate State-Space Models with Free-Parameterization
- Estimate State-Space Models with Canonical Parameterization
- Estimate State-Space Models with Structured Parameterization
- Use State-Space Estimation to Reduce Model Order
- What Are State-Space Models?
- Supported State-Space Parameterizations
- State-Space Model Estimation Methods
- Regularized Estimates of Model Parameters
- Estimating Models Using Frequency-Domain Data