ssregest
Estimate state-space model by reduction of regularized ARX model
Syntax
Description
Estimate State-Space Model
sys = ssregest(tt,nx)tt. You can use this syntax for SISO and MIMO systems.
The function assumes that the last variable in the timetable is the single
output signal. You can also use this syntax to estimate a time-series model if
tt contains a single variable that represents the sole
output.
For MIMO systems and for timetables that contain more variables than you plan
to use for estimation, you must also use name-value arguments to specify the
names of the input and output channels you want. For more information, see
tt.
To estimate a continuous-time model, set 'Ts' to
0 using name-value syntax.
sys = ssregest(u,y,nx,'Ts',Ts)u,y and the model sample time
Ts. The software assumes that the data sample time is
also Ts seconds. You can use this syntax for SISO, MISO,
and MIMO systems.
Estimating continuous-time models from matrix-based data is not recommended.
sys = ssregest(data,nx)data. Use this syntax especially when you want to
estimate a state-space model using frequency-domain or frequency-response data,
or when you want to take advantage of the additional information, such as data
sample time or experiment labeling, that data objects provide.
Specify Additional Options
sys = ssregest(___,nx,Name,Value)sys
=
ssregest(data,nx,'InputName',["u1","u2"],'OutputName',["y1","y3"]).
Use the 'Form', 'Feedthrough', and
'DisturbanceModel' name-value arguments to modify the
default behavior of the A, B,
C, D, and K
matrices.
Examples
Load the time-domain estimation data, which is contained in the timetable tt.
load sdata2.mat tt2;
Identify a third-order state-space model.
sys = ssregest(tt2,3);
Load estimation data, which is contained in the input/output matrix pair umat2 and ymat2.
load sdata2.mat umat2 ymat2
Estimate a third-order state-space model with input delay. Specify the sample time Ts as 0.1.
sys = ssregest(umat2,ymat2,3,'InputDelay',2,'Ts',0.1);
Load estimation data.
load iddata2 z2;
Specify the order of the regularized ARX model used by the software during estimation. Also, set the estimation focus to simulation.
opt = ssregestOptions('ARXOrder',[100 100 1],'Focus','simulation');
Identify a third-order state-space model.
sys = ssregest(z2,3,opt);
Load estimation data.
load sdata2 tt2;
Obtain the initial state values when identifying a third-order state-space model.
[sys,x0] = ssregest(tt2,3); x0
x0 = 3×1
-0.1111
0.1817
-1.0193
Load data.
load regularizationExampleData eData;
Create a transfer function model used for generating the estimation data (true system).
trueSys = idtf([0.02008 0.04017 0.02008],[1 -1.561 0.6414],1);
Obtain regularized impulse response (FIR) model.
opt = impulseestOptions('RegularizationKernel','DC'); m0 = impulseest(eData,70,opt);
Convert the model into a state-space model and reduce the model order.
m1 = balred(idss(m0),15);
Obtain a second state-space model using regularized reduction of an ARX model.
m2 = ssregest(eData,15);
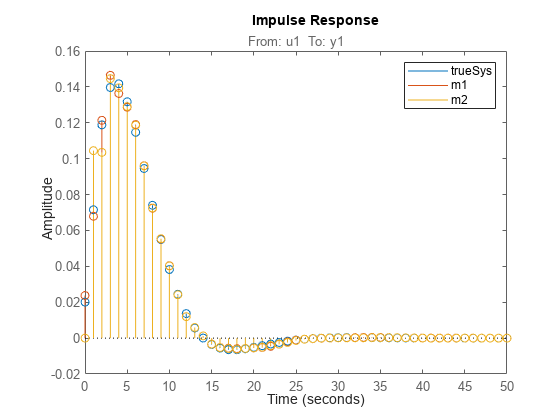
Compare the impulse responses of the true system and the estimated models.
impulse(trueSys,m1,m2,50); legend('trueSys','m1','m2');
Input Arguments
Name-Value Arguments
Output Arguments
More About
Tips
ssregestfunction provides improved accuracy thann4sidfor short, noisy data sets.For some problems, the quality of fit using
n4sidis sensitive to options, such asN4Horizon, whose values can be difficult to determine. In comparison, the quality of fit withssregestis less sensitive to its options, which makesssregestsimpler to use.
Algorithms
ssregest estimates a regularized ARX model
and converts the ARX model to a state-space model. The software then
uses balanced model reduction techniques to reduce the state-space
model to the specified order.
References
[1] Ljung, L. System Identification: Theory For the User, Second Edition, Appendix 4A, pp 132-134, Upper Saddle River, N.J: Prentice Hall, 1999.