tfest
估计传递函数模型
语法
说明
估计传递函数模型
sys = tfest(u,y,np)u、y 中的时域输入信号和输出信号估计连续时间传递函数。软件假设数据采样时间为 1 秒。您无法更改此假定的采样时间。如果您想根据采样时间不是 1 秒的数据来估计模型,则有两种选择:
通过使用
'Ts'名称-值参量设置采样时间来估计离散时间系统。例如,sys = tfest(u,y,np,'Ts',0.1)将采样时间设置为0.1。您可以将此语法与 SISO、MISO 和 MIMO 系统一起使用。在估计连续时间系统之前,将矩阵数据转换为
timetable或iddata对象。这些格式允许您将采样时间知识合并到数据中。有关详细信息,请参阅u、y。
不建议根据基于矩阵的数据估计连续时间模型。
sys = tfest(___,Name,Value)sys = tfest(um,ym,np,'Ts',0.1) 从采样时间为 0.1 的矩阵数据指定离散时间系统。使用 sys = tfest(data,np,nz,'InputNames',["u1","u2"],'OutputNames',["y1","y3"]) 指定与用于 MIMO 时间表数据的变量相对应的输入和输出信号变量名称。
配置初始参数
指定其他估计选项
返回估计的初始条件
[ 将估计的初始条件作为 sys,ic] = tfest(___)initialCondition 对象返回。如果您计划使用相同的估计输入数目据来仿真或预测模型响应,然后将响应与相同的估计输出数目据进行比较,请使用此语法。结合初始条件,可以在仿真的早期阶段使测量数据与仿真或预测数据更好地匹配。
示例
在时间表 tt1 中加载时域系统响应数据。
load sdata1.mat tt1;
设置极点点数 np 至 2 并估计传递函数。
np = 2; sys = tfest(tt1,np);
sys 是包含估计的双极点传递函数的 idtf 模型。
查看所得估计模型 sys 的分子和分母系数。
sys.Numerator
ans = 1×2
2.4554 176.9856
sys.Denominator
ans = 1×3
1.0000 3.1625 23.1631
要查看分子和分母估计值的不确定性以及其他信息,请使用 tfdata。
加载时域系统响应数据 z2 并使用它来估计包含两个极点和一个零点的传递函数。
load iddata2 z2; np = 2; nz = 1; sys = tfest(z2,np,nz);
sys 是包含估计传递函数的 idtf 模型。
加载数据 z2,它是一个包含时域系统响应数据的 iddata 对象。
load iddata2 z2;
估计一个包含两个极点和一个零点的传递函数模型 sys,并且其中包括一个已知的传输延迟 iodelay。
np = 2; nz = 1; iodelay = 0.2; sys = tfest(z2,np,nz,iodelay);
sys 是一个包含估计传递函数的 idtf 模型,其中 IODelay 属性设置为 0.2 秒。
加载时域系统响应数据 z2 并使用它来估计系统的二极点一零传递函数。通过将 iodelay 的值设置为 NaN 来为传递函数指定未知的传输延迟。
load iddata2 z2; np = 2; nz = 1; iodelay = NaN; sys = tfest(z2,np,nz,iodelay);
sys 是一个包含估计的传递函数的 idtf 模型,其 IODelay 属性是使用数据估计的。
加载时域系统响应数据,包含在输入和输出矩阵 umat2 和 ymat2 中。
load sdata2.mat umat2 ymat2
估计具有两个极点和一个零点的离散时间传递函数。将采样时间 Ts 指定为 0.1 秒,将传输延迟 iodelay 指定为 2 秒。
np = 2;
nz = 1;
iodelay = 2;
Ts = 0.1;
sysd = tfest(umat2,ymat2,np,nz,iodelay,'Ts',Ts)sysd =
From input "u1" to output "y1":
1.8 z^-1
z^(-2) * ----------------------------
1 - 1.418 z^-1 + 0.6613 z^-2
Sample time: 0.1 seconds
Discrete-time identified transfer function.
Parameterization:
Number of poles: 2 Number of zeros: 1
Number of free coefficients: 3
Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using TFEST on time domain data "umat2,ymat2".
Fit to estimation data: 80.26%
FPE: 2.095, MSE: 2.063
Model Properties
默认情况下,模型没有馈通,估计的传递函数的分子多项式具有零首项系数 b0。要估计 b0,请在估计期间指定 Feedthrough 属性。
加载估计数据 z5。
load iddata5 z5
首先,估计一个具有两个极点、一个零点且无馈通的离散时间传递函数模型。从 Ts 的 z5 属性获取采样时间。
np = 2;
nz = 1;
sys = tfest(z5,np,nz,'Ts',z5.Ts);估计的传递函数具有以下形式:
默认情况下,模型没有馈通,估计的传递函数的分子多项式具有零首项系数 b0。要估计 b0,请在估计期间指定 Feedthrough 属性。
sys = tfest(z5,np,nz,'Ts',z5.Ts,'Feedthrough',true);
估计的传递函数的分子多项式现在具有非零首项系数:
比较具有和不具有馈通和传输延迟的两个离散时间模型。
如果从测量的输入到输出存在延迟,则可以归因于缺乏馈通或实际的传输延迟。对于离散时间模型,不存在馈通对应于输入和输出之间一个采样的滞后。因此,使用 Feedthrough = false 和 iodelay = 0 估计模型会产生一个离散时间系统,该系统等同于使用 Feedthrough = true 和 iodelay = 1 估计的系统。两个系统都表现出相同的时域和频域响应,例如阶跃图和波特图。但是,如果使用 balred 简化这些模型或将它们转换为连续时间表示,则会得到不同的结果。因此,最佳做法是检查观察到的延迟是否可以归因于传输延迟或缺乏馈通。
估计没有馈通的离散时间模型。
load iddata1 z1 np = 2; nz = 2; sys1 = tfest(z1,np,nz,'Ts',z1.Ts);
因为 sys1 没有馈通,因此具有以 开头的分子多项式,所以 sys1 滞后一个采样。IODelay 属性为 0。
估计另一个具有馈通的离散时间模型,该模型从两个零减少到一个,从而产生一个采样输入-输出延迟。
sys2 = tfest(z1,np,nz-1,1,'Ts',z1.Ts,'Feedthrough',true);
比较模型的波特响应。
bode(sys1,sys2);
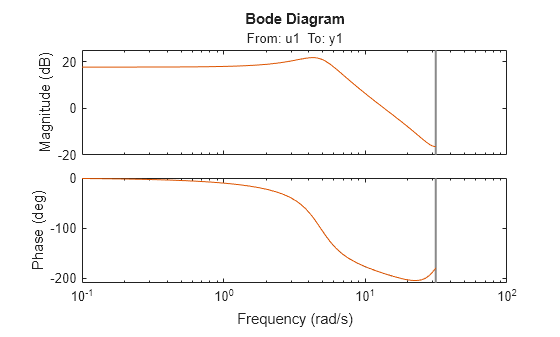
Sys 1 和 sys 2 所依据的离散方程是等价的,波特响应也是如此。
将模型转换为连续时间并比较这些模型的波特响应。
sys1c = d2c(sys1); sys2c = d2c(sys2); bode(sys1c,sys2c); legend
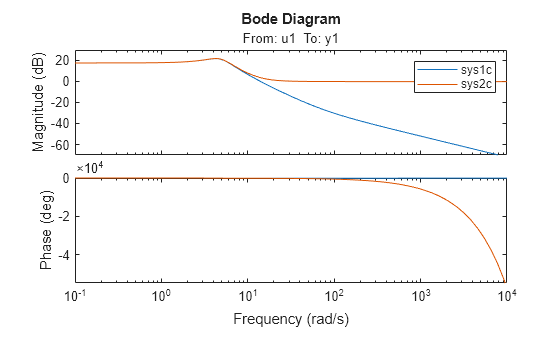
如图所示,当您将两个模型转换为连续时间时,它们的波特响应并不匹配。当没有馈通时,就像 sys1c 一样,必然会有一些滞后。当存在馈通时,就像 sys2c 一样,就不会出现滞后。连续时间馈通通映射到离散时间馈通。连续时间滞后映射到离散时间延迟。
估计一个双输入、单输出的离散时间传递函数,其中第一个输入有两个采样的延迟,第二个输入有零个采样。两个输入均无馈通。
加载数据并将数据分成估计和验证数据集。
load iddata7 z7 ze = z7(1:300); zv = z7(200:400);
估计一个两输入、一输出的传递函数,该传递函数的每个输入到输出传递函数有两个极点和一个零点。
Lag = [2;0]; Ft = [false,false]; model = tfest(ze,2,1,'Ts',z7.Ts,'Feedthrough',Ft,'InputDelay',Lag);
您选择的 Feedthrough 值决定了首分子系数是否为零(无馈通)(非零馈通)。延迟通常使用 InputDelay 或 IODelay 属性单独表示。此示例仅使用 InputDelay 来表达延迟。
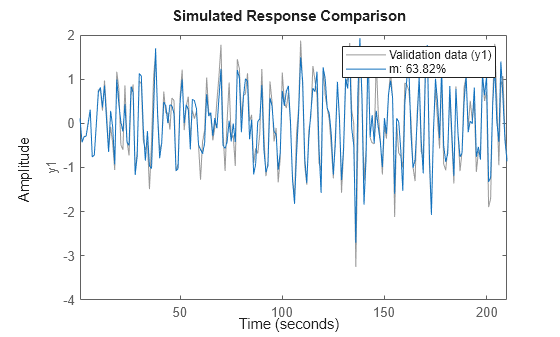
验证估计的模型。排除数据异常值以进行验证。
I = 1:201;
I(114:118) = [];
opt = compareOptions('Samples',I);
compare(zv,model,opt)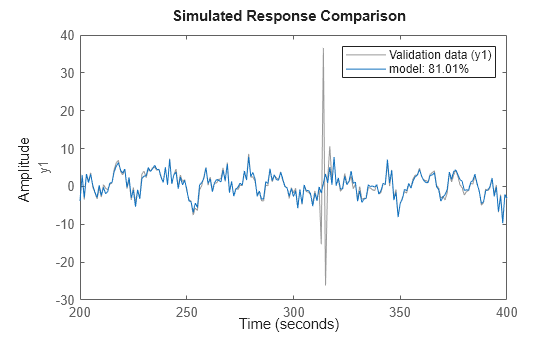
使用正则化冲激响应估计来辨识 15 阶传递函数模型。
加载数据。
load regularizationExampleData m0simdata;
获得正则化冲激响应 (FIR) 模型。
opt = impulseestOptions('RegularizationKernel','DC'); m0 = impulseest(m0simdata,70,opt);
将阶数降至 15 后,转化为传递函数模型。
m = idtf(balred(idss(m0),15));
将模型输出与数据进行比较。
compare(m0simdata,m);
为 tfest 创建一个选项集,指定初始化和搜索方法。还设置显示选项,指定显示每次迭代的损失函数值。
opt = tfestOptions('InitializeMethod','n4sid','Display','on','SearchMethod','lsqnonlin');
加载时域系统响应数据 z2 并使用它来估计具有两个极点和一个零点的传递函数。为估计选项指定 opt。
load iddata2 z2; np = 2; nz = 1; iodelay = 0.2; sys = tfest(z2,np,nz,iodelay,opt);
sys 是包含估计传递函数的 idtf 模型。
加载时域系统响应数据 z2,并使用它来估计二极点、一零点的传递函数。指定输入延迟。
load iddata2 z2; np = 2; nz = 1; input_delay = 0.2; sys = tfest(z2,np,nz,'InputDelay',input_delay);
sys 是一个 idtf 模型,包含输入延迟为 0.2 秒的估计传递函数。
使用 bode 获取以下系统的幅值和相位响应:
使用 100 个频率点(范围从 0.1 rad/s 到 10 rad/s)来获取频率响应数据。使用 frd 创建频率响应数据对象。
freq = logspace(-1,1,100); [mag,phase] = bode(tf([1 0.2],[1 2 1 1]),freq); data = frd(mag.*exp(1j*phase*pi/180),freq);
使用 data 估计三极点、一零点的传递函数。
np = 3; nz = 1; sys = tfest(data,np,nz);
sys 是包含估计传递函数的 idtf 模型。
加载时域系统响应数据 co2data,其中包含来自两个试验的数据,每个试验都有两个输入和一个输出。将第一个试验的数据转换为采样时间为 0.5 秒的 iddata 对象 data。
load co2data;
Ts = 0.5;
data = iddata(Output_exp1,Input_exp1,Ts);指定搜索方法以及输入和输出偏移的估计选项。还指定搜索迭代的最大次数。
opt = tfestOptions('SearchMethod','gna'); opt.InputOffset = [170;50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50;
使用测量数据和估计选项集 opt 估计传递函数。指定从输入到输出的传输延迟。
np = 3; nz = 1; iodelay = [2 5]; sys = tfest(data,np,nz,iodelay,opt);
iodelay 指定从第一个和第二个输入到输出的输入到输出延迟分别为 2 秒和 5 秒。
sys 是包含估计传递函数的 idtf 模型。
加载时域系统响应数据并使用它来估计系统的传递函数。指定已知和未知的传输延迟。
load co2data;
Ts = 0.5;
data = iddata(Output_exp1,Input_exp1,Ts);data 是一个 iddata 对象,具有两个输入通道和一个输出通道,采样率为 0.5 秒。
创建一个选项集 opt。指定搜索方法以及输入和输出偏移的估计选项。还指定搜索迭代的最大次数。
opt = tfestOptions('Display','on','SearchMethod','gna'); opt.InputOffset = [170; 50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50;
在 iodelay 中指定未知和已知的传输延迟,使用 2 表示已知延迟 2 秒,使用 nan 表示未知延迟。使用 iodelay 和 opt 估计传递函数。
np = 3; nz = 1; iodelay = [2 nan]; sys = tfest(data,np,nz,iodelay,opt);
sys 是包含估计传递函数的 idtf 模型。
创建具有预期分子和分母结构以及延迟约束的传递函数模型。
在这个例子中,试验数据由两个输入和一个输出组成。两种传输延迟都是未知的,并且具有相同的上限。此外,从两个输入到输出的传递函数在结构上是相同的。
init_sys = idtf(NaN(1,2),[1,NaN(1,3)],'IODelay',NaN);
init_sys.Structure(1).IODelay.Free = true;
init_sys.Structure(1).IODelay.Maximum = 7;init_sys 是一个 idtf 模型,描述从一个输入到输出的传递函数的结构。传递函数由一个零点、三个极点和一个传输延迟组成。使用 NaN 表示未知系数。
init_sys.Structure(1).IODelay.Free = true 表示传输延迟不固定。
init_sys.Structure(1).IODelay.Maximum = 7 将传输延迟的上限设置为 7 秒。
指定从两个输入到输出的传递函数。
init_sys = [init_sys,init_sys];
加载时域系统响应数据并使用它来估计传递函数。在 tfestOptions 选项集 opt 中指定选项。
load co2data; Ts = 0.5; data = iddata(Output_exp1,Input_exp1,Ts); opt = tfestOptions('Display','on','SearchMethod','gna'); opt.InputOffset = [170;50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50; sys = tfest(data,init_sys,opt);
sys 是包含估计传递函数的 idtf 模型。
通过比较分析估计结果。创建 compareOptions 选项集 opt2 并指定输入和输出偏移量,然后使用 compare。
opt2 = compareOptions; opt2.InputOffset = opt.InputOffset; opt2.OutputOffset = opt.OutputOffset; compare(data,sys,opt2)
![]()
对于给定的数据,估计包含不同数量极点输入-输出极点的多输入、单输出传递函数。
获取频率响应数据。
例如,使用 frd 为以下系统创建频率响应数据模型:
使用 100 个频率点(范围从 0.01 rad/s 到 100 rad/s)来获取频率响应数据。
G = tf({[1 2],[5]},{[1 2 4 5],[1 2 1 1 0]},0,'IODelay',[4 0.6]);
data = frd(G,logspace(-2,2,100));data 是一个 frd 对象,包含 G 的连续时间频率响应。
估计 data 的传递函数。
np = [3 4]; nz = [1 0]; iodelay = [4 0.6]; sys = tfest(data,np,nz,iodelay);
np 指定估计的传递函数中的极点点数。np 的第一个元素表示从第一个输入到输出的传递函数包含三个极点。类似地,np 的第二个元素表示从第二个输入到输出的传递函数包含四个极点。
nz 指定估计的传递函数中零点的数量。nz 的第一个元素表示从第一个输入到输出的传递函数包含一个零。类似地,np 的第二个元素表示从第二个输入到输出的传递函数不包含任何零。
iodelay 指定从第一个输入到输出的传输延迟为 4 秒。从第二个输入到输出的传输延迟指定为 0.6 秒。
sys 是包含估计传递函数的 idtf 模型。
使用频率响应数据估计描述不稳定系统的传递函数。
使用 idtf 构建以下系统的传递函数模型 G:
G = idtf({[1 2], 5},{[1 2 4 5],[1 2 1 1 1]});使用 idfrd 获取 data 的频率响应数据模型 G。指定 100 个频率点,范围从 0.01 rad/s 到 100 rad/s。
data = idfrd(G,logspace(-2,2,100));
data 是一个 idfrd 对象。
估计 data 的传递函数。
np = [3 4]; nz = [1 0]; sys = tfest(data,np,nz);
np 指定估计的传递函数中的极点点数。np 的第一个元素表示从第一个输入到输出的传递函数包含三个极点。类似地,np 的第二个元素表示从第二个输入到输出的传递函数包含四个极点。
nz 指定估计的传递函数中零点的数量。nz 的第一个元素表示从第一个输入到输出的传递函数包含一个零。类似地,nz 的第二个元素表示从第二个输入到输出的传递函数不包含任何零。
sys 是包含估计传递函数的 idtf 模型。
pole(sys)
ans = 7×1 complex
-1.5260 + 0.0000i
-0.2370 + 1.7946i
-0.2370 - 1.7946i
-1.4656 + 0.0000i
-1.0000 + 0.0000i
0.2328 + 0.7926i
0.2328 - 0.7926i
sys 是一个不稳定系统,正如极点显示所示。
加载高密度频率响应测量数据。数据对应于使用反馈控制维持平衡的不稳定过程。
load HighModalDensityData FRF f
将数据打包为 idfrd 对象以便辨识,并找到波特幅值响应。
G = idfrd(permute(FRF,[2 3 1]),f,0,'FrequencyUnit','Hz'); bodemag(G)
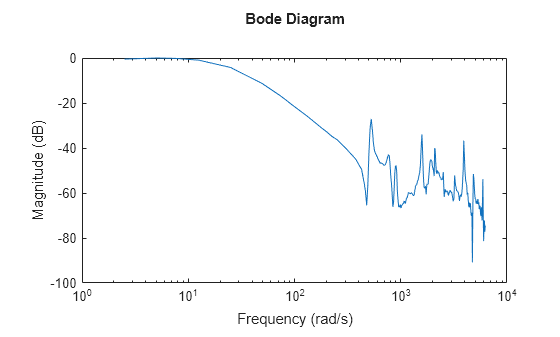
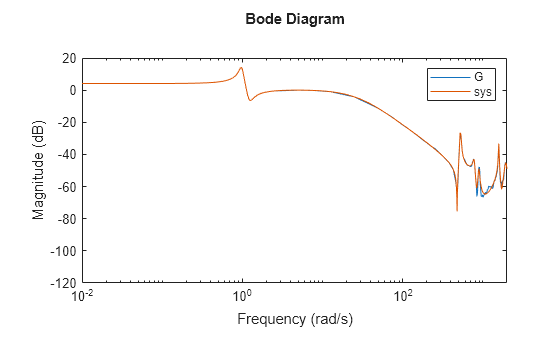
估计具有 32 个极点和 32 个零点的传递函数,并比较波特幅值响应。
sys = tfest(G,32,32); bodemag(G, sys) xlim([0.01,2e3]) legend
加载数据并绘图。
load iddata1ic z1i plot(z1i)
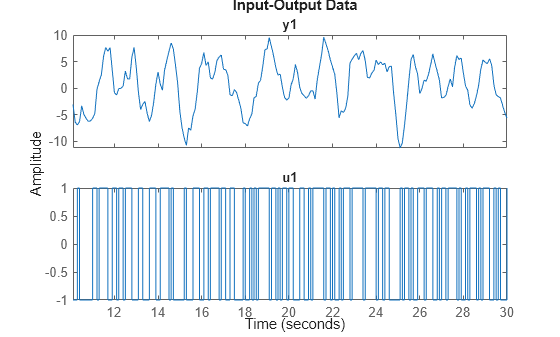
检查输出数目据 y(1) 的初始值。
ystart = z1i.y(1)
ystart = -3.0491
测量输出不从 0 开始。
估计二阶传递函数 sys 并返回估计的初始条件 ic。
[sys,ic] = tfest(z1i,2,1); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0.2957 5.2441]
Ts: 0
ic 是一个 initialCondition 对象,它以状态空间形式封装了 sys 对 X0 中的初始状态向量的自由响应。
使用估计数据仿真 sys,但不纳入初始条件。绘制仿真输出与测量输出的图。
y_no_ic = sim(sys,z1i); plot(y_no_ic,z1i) legend('Model Response','Output Data')
在仿真开始时,测量输出和仿真输出并不一致。
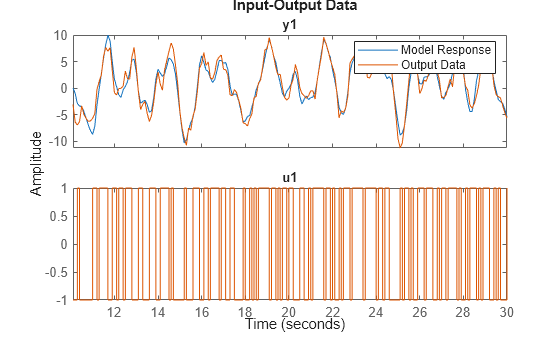
将初始条件纳入 simOptions 选项集。
opt = simOptions('InitialCondition',ic); y_ic = sim(sys,z1i,opt); plot(y_ic,z1i) legend('Model Response','Output Data')
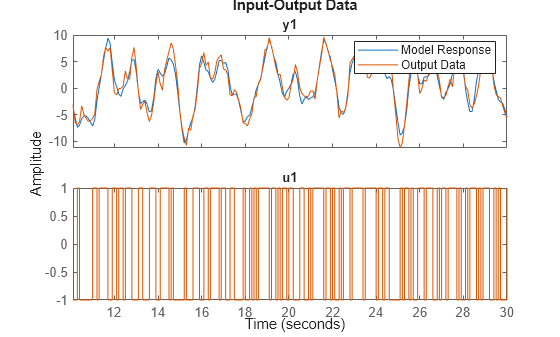
仿真将模型对输入信号的响应与对初始条件的自由响应结合起来。现在,仿真开始时测量和仿真的输出具有更好的一致性。该初始条件仅对估计数据 z1i 有效。
输入参数
名称-值参数
输出参量
算法
参考
[1] Garnier, H., M. Mensler, and A. Richard. “Continuous-Time Model Identification from Sampled Data: Implementation Issues and Performance Evaluation.” International Journal of Control 76, no. 13 (January 2003): 1337–57. https://doi.org/10.1080/0020717031000149636.
[2] Ljung, Lennart. “Experiments with Identification of Continuous Time Models.” IFAC Proceedings Volumes 42, no. 10 (2009): 1175–80. https://doi.org/10.3182/20090706-3-FR-2004.00195.
[3] Young, Peter, and Anthony Jakeman. “Refined Instrumental Variable Methods of Recursive Time-Series Analysis Part III. Extensions.” International Journal of Control 31, no. 4 (April 1980): 741–64. https://doi.org/10.1080/00207178008961080.
[4] Drmač, Z., S. Gugercin, and C. Beattie. “Quadrature-Based Vector Fitting for Discretized H2 Approximation.” SIAM Journal on Scientific Computing 37, no. 2 (January 2015): A625–52. https://doi.org/10.1137/140961511.
[5] Ozdemir, Ahmet Arda, and Suat Gumussoy. “Transfer Function Estimation in System Identification Toolbox via Vector Fitting.” IFAC-PapersOnLine 50, no. 1 (July 2017): 6232–37. https://doi.org/10.1016/j.ifacol.2017.08.1026.
版本历史记录
在 R2012a 中推出另请参阅
tfestOptions | idtf | timetable | ssest | procest | ar | arx | oe | bj | polyest | greyest
主题
- 在命令行估计传递函数模型
- Estimate Transfer Function Models with Transport Delay to Fit Given Frequency-Response Data
- Estimate Transfer Function Models with Prior Knowledge of Model Structure and Constraints
- Apply Initial Conditions When Simulating Identified Linear Models
- Troubleshoot Frequency-Domain Identification of Transfer Function Models
- 什么是传递函数模型?
- Regularized Estimates of Model Parameters
- Estimating Models Using Frequency-Domain Data