armax
使用时域数据估计 ARMAX、ARIMAX、ARMA 或 ARIMA 模型的参数
语法
说明
估计 ARMAX 或 ARMA 模型
sys = armax(tt,[na nb nc nk])sys 的变量中包含的数据来估计 ARMAX 或 ARMA idpoly 模型 tt 的参数。软件以第一个 Nu 个变量作为输入,以接下来的 Ny 个变量作为输出,其中 Nu 和 Ny 分别由 nb 和 na 的维度确定。
对于没有输入信号的 ARMA 模型,使用 sys = armax(tt,na)。在这种情况下,软件使用第一个 Ny 变量来拟合模型。
armax 使用预测误差方法和 [na nb nc nk] 中指定的多项式阶数执行估计。模型属性包括估计协方差(参数不确定性)以及估计数据和测量数据之间的拟合优度。
要从 tt 中选择特定的输入和输出通道,请使用名称-值语法将 'InputName' 和 'OutputName' 设置为相应的时间表变量名称。
sys = armax(u,y,[na nb nc nk])u,y 中的时域输入和输出信号。软件假设数据采样时间为 1 秒。要更改采样时间,请使用名称-值语法设置 Ts。
sys = armax(data,[na nb nc nk])iddata 对象 data 中的时域数据。特别是当您想利用数据对象提供的附加信息(例如数据采样时间或试验标注)时,请使用此语法。
sys = armax(___,Name,Value)'IntegrateNoise',1 估计 ARIMAX 或 ARIMA 模型,这对于具有非平稳扰动的系统很有用。在任意先前的输入参数组合之后指定 Name,Value。
配置初始参数
返回估计的初始条件
[ 将估计的初始条件作为 sys,ic] = armax(___)initialCondition 对象返回。如果您计划使用相同的估计输入数目据来仿真或预测模型响应,然后将响应与相同的估计输出数目据进行比较,请使用此语法。结合初始条件,在仿真的第一部分可以得到更好的匹配。
示例
估计 ARMAX 模型并查看模型输出与估计数据的拟合程度。
在时间表 tt2 中加载测量数据。
load sdata2 tt2
估计具有二阶 、 和 多项式以及一个采样周期的传输延迟的 ARMAX 模型。
na = 2; nb = 2; nc = 2; nk = 1; sys = armax(tt2,[na nb nc nk])
sys =
Discrete-time ARMAX model: A(z)y(t) = B(z)u(t) + C(z)e(t)
A(z) = 1 - 1.512 z^-1 + 0.7006 z^-2
B(z) = -0.2606 z^-1 + 1.664 z^-2
C(z) = 1 - 1.604 z^-1 + 0.7504 z^-2
Sample time: 0.1 seconds
Parameterization:
Polynomial orders: na=2 nb=2 nc=2 nk=1
Number of free coefficients: 6
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using ARMAX on time domain data "tt2".
Fit to estimation data: 85.89% (prediction focus)
FPE: 1.086, MSE: 1.054
Model Properties
输出显示包含估计参数的多项式以及估计细节。在 Status, Fit to estimation data 下显示估计模型的 1 步预测准确率在 80% 以上。
将模型仿真输出与测量数据进行比较。
compare(tt2,sys)
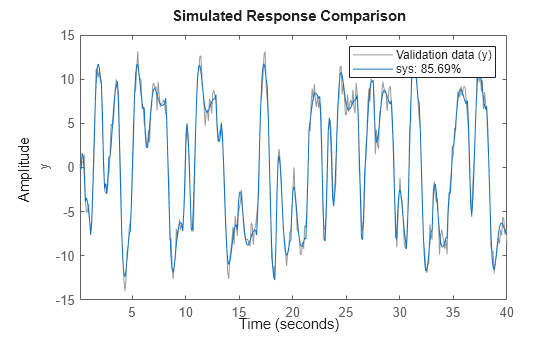
仿真模型与测量数据的拟合度与估计拟合度几乎相同。
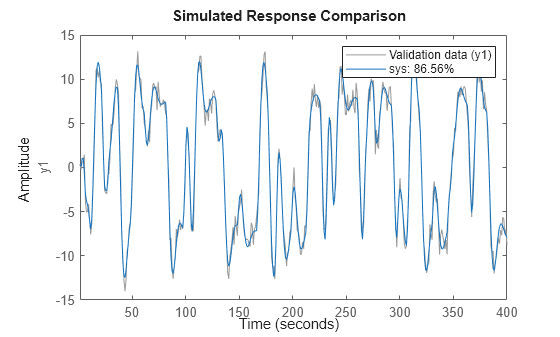
估计 ARMA 模型并将其响应与测量输出和 AR 模型进行比较。
加载数据,其中包含带有噪声的时间序列 ymat9。
load sdata9 ymat9
用一阶 多项式估计四阶 ARMA 模型。
na = 4; nc = 1; sys = armax(ymat9,[na nc]);
估计一个四阶 AR 模型。
sys_ar = ar(ymat9,na);
将模型输出与测量数据进行比较。
compare(ymat9,sys,sys_ar)
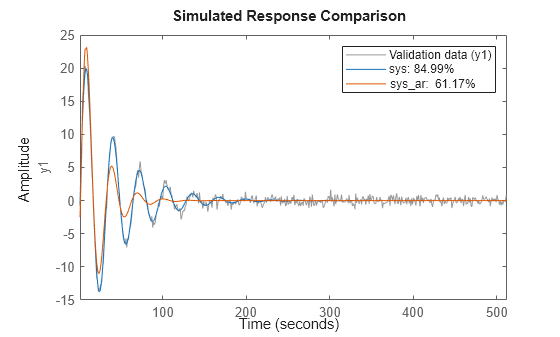
ARMA 模型对数据的拟合效果较好。
从测量数据估计 ARMAX 模型并指定估计选项。
加载数据并创建一个 iddata 对象。初始化选项集 opt,并设置 Focus、SearchMethod、MaxIterations 和 Display 的选项。然后使用更新后的选项集估计 ARMAX 模型。
load twotankdata; z = iddata(y,u,0.2); opt = armaxOptions; opt.Focus = 'simulation'; opt.SearchMethod = 'lm'; opt.SearchOptions.MaxIterations = 10; opt.Display = 'on'; sys = armax(z,[2 2 2 1],opt);
进度查看器中显示的模型测量组件的终止条件是达到最大迭代次数。
为了改善结果,请使用更大的 MaxIterations 值重新估计模型,或者继续对之前估计的模型进行如下迭代:
sys2 = armax(z,sys); compare(z,sys,sys2)
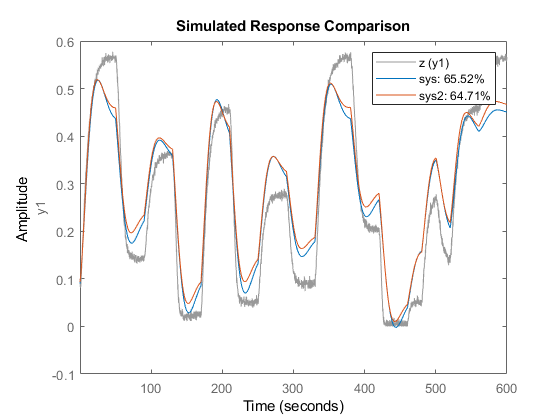
其中 sys2 细化了 sys 的参数以改善数据拟合。
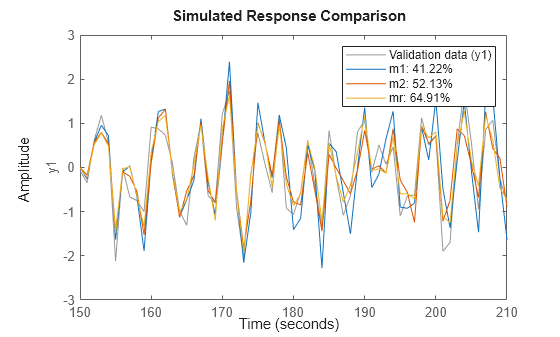
通过转换正则化的 ARX 模型来估计正则化的 ARMAX 模型。
加载数据。
load regularizationExampleData.mat m0simdata;
估计阶数为 30 的非正则化 ARMAX 模型。
m1 = armax(m0simdata(1:150),[30 30 30 1]);
通过反复试验确定 Lambda 值来估计正则化 ARMAX 模型。
opt = armaxOptions; opt.Regularization.Lambda = 1; m2 = armax(m0simdata(1:150),[30 30 30 1],opt);
通过转换正则化的 ARX 模型,然后进行降阶,得到低阶的 ARMAX 模型。
opt1 = arxOptions; [L,R] = arxRegul(m0simdata(1:150),[30 30 1]); opt1.Regularization.Lambda = L; opt1.Regularization.R = R; m0 = arx(m0simdata(1:150),[30 30 1],opt1); mr = idpoly(balred(idss(m0),7));
将模型输出与数据进行比较。
opt2 = compareOptions('InitialCondition','z'); compare(m0simdata(150:end),m1,m2,mr,opt2);
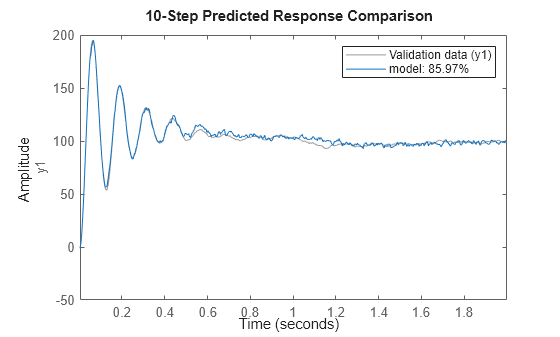
估计单变量时间序列数据的四阶 ARIMA 模型。
加载包含噪声的时间序列的数据。
load iddata9 z9;
对输出信号进行积分,并使用结果替换 z9 中的原始输出信号。
z9.y = cumsum(z9.y);
通过将 'IntegrateNoise' 设置为 true,用一阶 多项式估计四阶 ARIMA 模型。
model = armax(z9,[4 1],'IntegrateNoise',true); 使用 10 步预测来预测模型输出,并将预测输出与估计数据进行比较。
compare(z9,model,10)
根据测量数据迭代估计不同阶数的 ARMAX 模型。
加载 dryer2 数据并对多项式阶数 na、nb、nc 和输入延迟 nk 的组合进行估计。
load dryer2; z = iddata(y2,u2,0.08,'Tstart',0); na = 2:4; nc = 1:2; nk = 0:2; models = cell(1,18); ct = 1; for i = 1:3 na_ = na(i); nb_ = na_; for j = 1:2 nc_ = nc(j); for k = 1:3 nk_ = nk(k); models{ct} = armax(z,[na_ nb_ nc_ nk_]); ct = ct+1; end end end
堆叠估计模型并将它们的仿真响应与估计数据 z 进行比较。
models = stack(1,models{:});
compare(z,models)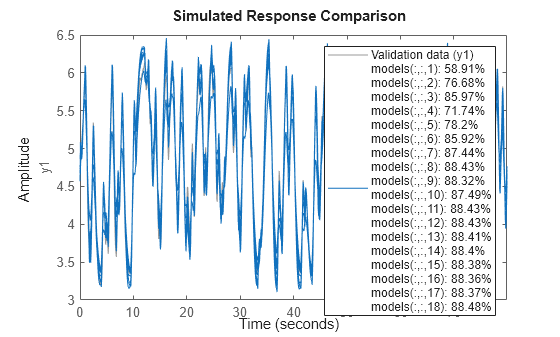
加载估计数据。
load sdata2 umat2 ymat2
从估计数据中估计 3 阶状态空间模型。
sys0 = n4sid(umat2,ymat2,3);
使用先前估计的状态空间模型来估计 ARMAX 模型以初始化参数。
sys = armax(umat2,ymat2,sys0); compare(umat2,ymat2,sys)
加载数据。
load iddata1ic z1i
估计二阶 ARMAX 模型 sys 并返回 ic 中的初始条件。
na = 2; nb = 2; nc = 2; nk = 1; [sys,ic] = armax(z1i,[na nb nc nk]); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0 1]
Ts: 0.1000
ic 是一个 initialCondition 对象,它以状态空间形式封装了 sys 对 X0 中的初始状态向量的自由响应。当您使用 ic 输入信号仿真 sys 并将响应与 z1i 输出信号进行比较时,您可以合并 z1i。
输入参数
名称-值参数
输出参量
详细信息
算法
迭代搜索算法最小化稳健二次预测误差标准。当下列任一情况为真时,迭代终止:
已达到最大迭代次数。
预期的改进小于指定的容差。
无法找到该标准的较低值。
您可以使用 sys.Report.Termination 获取有关停止标准的信息。
使用 armaxOptions 选项集来创建和配置影响估计结果的选项。具体来说,使用 MaxIterations 属性设置搜索算法属性,例如 Tolerance 和 'SearchOptions'。
当您没有为迭代搜索指定初始参数值作为初始模型时,它们将在特殊的四阶段 LS-IV 算法中构建。
稳健性的截止值基于 Advanced.ErrorThreshold 估计选项以及残差与初始参数估计的估计标准差。最小化期间不会重新计算截止值。默认情况下,不执行任何鲁棒性;ErrorThreshold 选项的默认值 0。
为了确保只测试与稳定预测变量相对应的模型,该算法会对预测变量进行稳定性测试。通常, 和 (如果适用)都必须在单位圆内全部为零。
当估计选项 'Display' 为 'On' 或 'Full' 时,屏幕上会显示最小化信息。当 'Display' 为 'Full' 时,当前和之前的参数估计值都以列向量形式显示,并且参数按字母顺序列出。此外,还给出了标准函数(成本)的值,并显示了高斯-牛顿向量及其范数。当 'Display' 为 'On' 时,仅显示标准值。
备选方法
armax 不支持连续时间模型估计。使用 tfest 估计连续时间传递函数模型,或使用 ssest 估计连续时间状态空间模型。
armax 仅支持时域数据。对于频域数据,使用 oe 来估计输出-误差 (OE) 模型。
参考
[1] Ljung, L. System Identification: Theory for the User, Second Edition. Upper Saddle River, NJ: Prentice-Hall PTR, 1999. See chapter about computing the estimate.