compare
将辨识模型输出与测量的输出进行比较
语法
说明
绘制仿真和测量输出
预测模型输出
compare(___, 使用 kstep)sys 指定的预测范围来预测 kstep 的响应。预测使用输出测量以及输入测量来工程未来的响应。kstep 表示每个输出测量的时间点和最终预测响应的时间点之间的时间采样数。
有关预测的详细信息,请参阅Simulate and Predict Identified Model Output。您可以将此语法与任何先前的输入/输出组合一起使用。
示例
辨识线性模型并使用生成该模型的数据来可视化仿真模型响应。
在 tt1 中加载输入/输出测量,并辨识三阶状态空间模型 sys。
load sdata1 tt1; sys = ssest(tt1,3);
sys 是一个连续时间辨识状态空间 (idss) 模型。
使用 compare 仿真 sys 响应并将其与 tt1 中的数据一起绘制。
figure compare(tt1,sys)
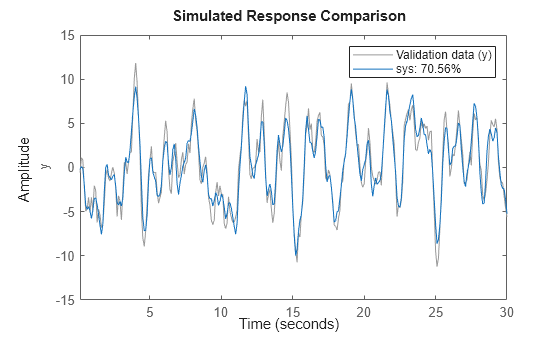
该图说明了模型响应和原始数据之间的差异。图例中显示的百分比是 NRMSE 适应度值。它表示预测模型输出与数据的接近程度。
要更改图中的显示选项,右键点击该图以访问上下文菜单。例如:
要绘制预测输出和测量输出之间的误差,请选择 Error Plot。
要查看仿真响应的置信域,请选择 Characteristics-> ConfidenceRegion。
要指定要绘制的标准差数,请双击该图并打开 Property Editor 对话框。在 Options 选项卡中,指定 Confidence Region for Identified Models 中的标准差数。默认值是
1标准差。
辨识线性模型并使用计算数据可视化预测的模型响应。
使用 umat1 和 ymat1 中的输入/输出测量来辨识三阶状态空间模型。
load sdata1 umat1 ymat1 Ts sys = ssest(umat1,ymat1,3,'Ts',Ts);
sys 是一个离散时间辨识状态空间 (idss) 模型。
现在使用 compare 来绘制预测响应。预测与仿真的不同之处在于,它在计算系统响应时同时使用测量的输入和测量的输出。预测范围定义了相对于当前测量的输出点,预测未来多远的情况。对于此示例,将预测范围 kstep 设置为 10 步,并使用 compare 绘制预测响应与原始测量数据的关系。
kstep = 10; compare(umat1,ymat1,sys,kstep)
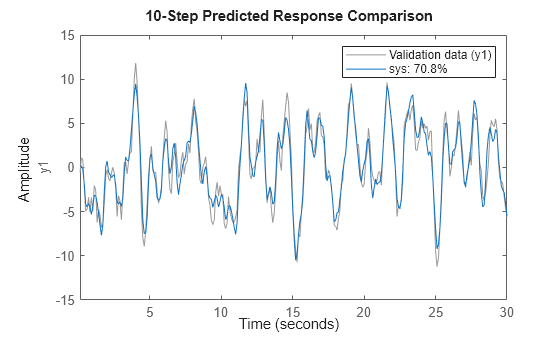
在此图中,每个 sys 数据点代表与至少 10 步前获取的输出测量数据相关的预测输出。例如,t = 15s 时的点基于 t = 5s 或之前进行的输出测量。这个 t = 15s sys 数据点的计算也使用了高达 t = 15s 的输入测量值,就像仿真一样。
该图说明了模型响应和原始数据之间的差异。图例中显示的百分比是 NRMSE 适应度值。它表示预测模型输出与数据的匹配程度。
要更改图中的显示和仿真选项,右键点击该图以访问上下文菜单。例如,要绘制预测输出和测量输出之间的误差,请从上下文菜单中选择 Error Plot。要更改预测范围值,或在仿真和预测之间切换,请从上下文菜单中选择 Prediction Horizon。
确定同一数据的几种模型类型,并比较结果以查看哪种模型最适合数据。
加载数据,其中包含具有单个输入和输出的 iddata 对象 z1。
load iddata1;从 z1 中,为下列每个线性形式确定一个模型:
2、3 和 1 阶 ARMAX (
idpoly),死区时间为 0具有三个状态的状态空间 (
idss)具有三个极点的传递函数 (
idtf)
sys_armax = armax(z1,[2 3 1 0]); sys_ss = ssest(z1,3); sys_tf = tfest(z1,3);
使用 compare,绘制带有 z1 的三个模型的仿真响应。
compare(z1,sys_armax,sys_ss,sys_tf)
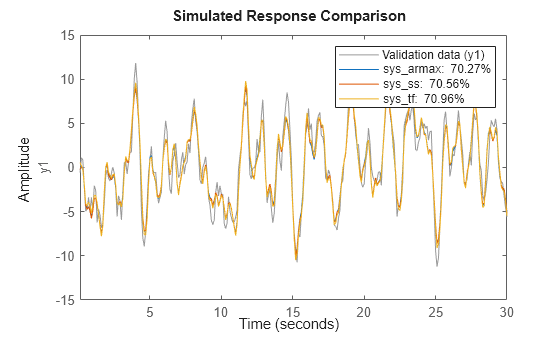
对于这组数据,以及所有模型的默认设置,传递函数形式具有最佳的 NRMSE 拟合度。然而,所有模型的拟合度都在 1% 左右的范围内。
您可以通过右键点击图并将鼠标悬停在 Systems 上,以交互方式控制在图中显示哪些模型响应。
将不同类型的多个估计模型的输出与测量的频域数据进行比较。
对于此示例,从频率响应数据估计过程模型和输出-误差多项式。
load demofr % frequency response data zfr = AMP.*exp(1i*PHA*pi/180); Ts = 0.1; data = idfrd(zfr,W,Ts); sys1 = procest(data,'P2UDZ'); sys2 = oe(data,[2 2 1]);
sys1 是一个 idproc 模型,是一个连续时间过程模型。sys2 是一个 idpoly 模型,是一个离散时间输出-误差模型。
将估计模型的频率响应与数据进行比较。
compare(data,sys1,'g',sys2,'r');
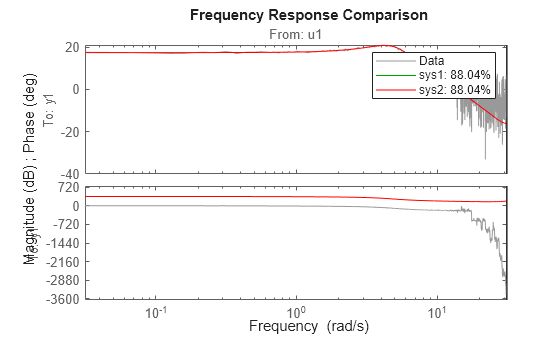
这两个模型的 NRMSE 拟合值相对于计算它们的数据来说几乎相等。
当您将估计模型与测量数据进行比较时,修改默认行为。
估计测量数据的传递函数。
load sdata1 tt1; sys = tfest(tt1,3);
sys 是一个连续时间辨识传递函数 (idtf) 模型。
假设您希望初始条件为零。compare 的默认值是从数据中估计初始条件。
创建一个选项集来指定初始条件处理。要使用零作为初始条件,请为 'z' 选项指定 'InitialCondition'。
opt = compareOptions('InitialCondition','z');
使用比较选项集将估计的传递函数模型输出与测量数据进行比较。
compare(tt1,sys,opt)

加载数据。
load iddata2 z2
将数据分为估计集和验证集。
z2e = z2(1:200); z2v = z2(201:400); idplot(z2e,z2v)
使用估计数据估计状态空间模型和传递函数模型。
sys_ss = ssest(z2e,2); sys_tf = tfest(z2e,2,1);
使用 compare 获取 ic_ss 的初始条件 sys_ss。
[y_ss,fit_ss,ic_ss] = compare(z2e,sys_ss); ic_ss
ic_ss = 2×1
-0.0018
0.0016
ic_ss 是初始状态的数值向量。
使用 compare 获取 ic_tf 的初始条件 sys_tf。
[y_tf,fit_tf,ic_tf] = compare(z2e,sys_tf); ic_tf
ic_tf =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [-1.6093 5.1442]
Ts: 0
ic_tf 是一个 initialCondition 对象,它以状态空间形式包含 sys_tf 对初始条件的自由响应模型。A 和 C 包含自由响应信息,而 X0 包含初始状态。
现在使用验证数据立即获取两个模型的初始条件。
[y_sstf,fit_sstf,ic_sstf] = compare(z2v,sys_ss,sys_tf); ic_sstf
ic_sstf=2×1 cell array
{2×1 double }
{1×1 initialCondition}
ic_sstf 是一个元胞数组,包含 sys_ss 的初始状态向量和 initialCondition 的 sys_tf 对象。
compare 可以为具有任何测量数据集的现有模型提供初始条件。
输入参数
输出参量
提示
使用
compare获得的 NRMSE 拟合结果可能与模型辨识中报告的拟合值不完全匹配。这些差异通常源于初始条件的不匹配,以及预测范围辨识和验证默认值的差异。差异通常很小,不会影响您的模型选择和验证工作流程。有关详细信息,请参阅Resolve Fit Value Differences Between Model Identification and compare Command。compare根据通道名称匹配data和sys中的输入/输出通道。因此,可以评估不使用data中可用的所有输入通道的模型。这种灵活性使您可以比较多个模型,每个模型都是从不同的输入/输出通道集独立辨识的。compare图允许您改变关键参数。例如,您可以交互地控制:无论生成仿真响应还是预测响应
预测时域值
初始条件处理
您查看的试验数据
您查看的系统模型
要访问控件,右键点击图以调出选项菜单。