ar
辨识标量时间序列的 AR 模型或 ARI 模型时估计参数
语法
说明
示例
估计 AR 模型并将其响应与测量的输出进行比较。
加载数据,其中包含带有噪声的时间序列 tt9。
load sdata9 tt9
估计一个四阶 AR 模型。
sys = ar(tt9,4)
sys =
Discrete-time AR model: A(z)y(t) = e(t)
A(z) = 1 - 0.8369 z^-1 - 0.4744 z^-2 - 0.06621 z^-3 + 0.4857 z^-4
Sample time: 0.0039062 seconds
Parameterization:
Polynomial orders: na=4
Number of free coefficients: 4
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using AR ('fb/now') on time domain data "tt9".
Fit to estimation data: 79.38%
FPE: 0.5189, MSE: 0.5108
Model Properties
输出显示包含估计参数以及其他估计细节的多项式。在 Status、Fit to estimation data 下显示估计模型的 1 步预测准确率在 75% 以上。
您可以通过浏览估计报告 sys.Report 来找到有关估计结果的详细信息。例如,您可以检索参数协方差。
covar = sys.Report.Parameters.FreeParCovariance
covar = 4×4
0.0015 -0.0015 -0.0005 0.0007
-0.0015 0.0027 -0.0008 -0.0004
-0.0005 -0.0008 0.0028 -0.0015
0.0007 -0.0004 -0.0015 0.0014
有关查看估计报告的详细信息,请参阅Estimation Report。
给定一个带有噪声的正弦信号,将伯格方法的频谱估计值与使用前向-后向方法找到的频谱估计值进行比较。
生成输出信号并将其转换为 iddata 对象。
y = sin([1:300]') + 0.5*randn(300,1); y = iddata(y);
使用伯格方法和默认的前向-后向方法估计四阶 AR 模型。将模型频谱绘制在一起。
sys_b = ar(y,4,'burg'); sys_fb = ar(y,4); spectrum(sys_b,sys_fb) legend('Burg','Forward-Backward')

在大部分频率范围内,这两个响应非常匹配。
估计一个 ARI 模型,其中包括噪声源中的积分器。
加载数据,其中包含带有噪声的时间序列 ymat9。Ts 包含采样时间。
load sdata9 ymat9 Ts
对输出信号进行积分。
y = cumsum(ymat9);
估计将 'IntegrateNoise' 设置为 true 的 AR 模型。使用最小二乘法 'ls'。
sys = ar(y,4,'ls','Ts',Ts,'IntegrateNoise',true);
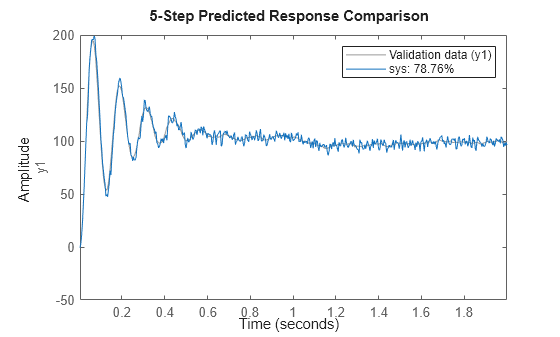
使用 5 步预测来预测模型输出,并将结果与积分输出信号 y 进行比较。
compare(y,sys,5)
修改 AR 函数的默认选项。
加载数据,其中包含带有噪声的时间序列 z9。
load iddata9 z9
修改默认选项,以便函数使用 'ls' 方法并且不估计协方差。
opt = arOptions('Approach','ls','EstimateCovariance',false)
opt =
Option set for the ar command:
Approach: 'ls'
Window: 'now'
DataOffset: 0
EstimateCovariance: 0
MaxSize: 250000
Description of options
使用更新的选项估计四阶 AR 模型。
sys = ar(z9,4,opt);
检索使用伯格方法时的反射系数和损失函数。
基于格的方法,例如伯格方法 'burg' 和几何格 'gl',计算反射系数和相应的损失函数值作为估计过程的一部分。使用第二个输出参量来检索这些值。
生成输出信号并将其转换为 iddata 对象。
y = sin([1:300]') + 0.5*randn(300,1); y = iddata(y);
使用伯格方法估计四阶 AR 模型,并包括反射系数的输出参量。
[sys,refl] = ar(y,4,'burg');
reflrefl = 2×5
0 -0.3562 0.4430 0.5528 0.2385
0.8494 0.7416 0.5960 0.4139 0.3904
输入参数
名称-值参数
输出参量
详细信息
算法
使用最小二乘法的变体来估计 AR 和 ARI 模型参数。下表总结了具有特定 approach 和 window 参量值组合的方法的通用名称。
| 方法 | 方法与加窗 |
|---|---|
| 修正协方差法 | (默认)无加窗的前向-后向方法 |
| 相关性方法 | 采用预窗口和后窗口的尤尔-沃克方法 |
| 协方差方法 | 无加窗的最小二乘法。arx 使用这个例程 |
参考
[1] Marple, S. L., Jr. Chapter 8. Digital Spectral Analysis with Applications. Englewood Cliffs, NJ: Prentice Hall, 1987.