RespConfig
Description
Use a RespConfig object to specify options for plotting step
responses (step, stepplot), impulse responses (impulse, impulseplot), and initial responses (initial (Control System Toolbox) and initialplot (Control System Toolbox)).
Step responses apply configuration as follows.
In the SISO case
In the MIMO case, the step response of the jth input channel is obtained by setting
where ej is the jth basis vector.
Impulse responses apply configuration as follows.
Here:
U is the baseline input value.
dU is the input level change relative to U.
T0 is the start time.
Td is the time at which the change occurs relative to T0.
Creation
Description
respOpt = RespConfig
respOpt = RespConfig(PropertyName=Value)
Properties
Object Functions
impulse | Impulse response plot of dynamic system; impulse response data |
impulseplot | Plot impulse response of dynamic system |
step | Step response of dynamic system |
stepplot | Plot step response of dynamic system |
Examples
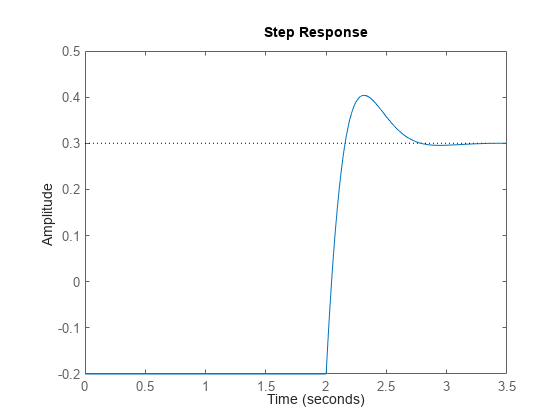
Create a transfer function model.
sys = tf([1 5],[1 10 50]);
Create an option set to specify step input bias, amplitude, and delay.
Config = RespConfig(Bias=-2,Amplitude=5,Delay=2);
Calculate the step response using the specified options.
step(sys,Config)
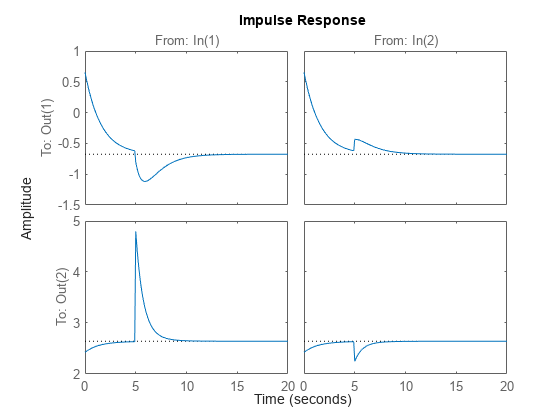
Create a state-space model.
A = [-0.8429,-0.2134;-0.5162,-1.2139]; B = [0.7254,0.7147;0,-0.2050]; C = [-0.1241,1.4090;1.4897,1.4172]; D = [0.6715,0.7172;-1.2075,0]; sys = ss(A,B,C,D);
Create a default option set and use the dot notation to specify values.
respOpt = RespConfig; respOpt.Bias = [-2,3]; respOpt.Amplitude = [2,-0.5]; respOpt.InitialState = [0.1,-0.1]; respOpt.Delay = 5;
Compute the impulse response.
t = 0:0.1:20; impulse(sys,t,respOpt)
Version History
Introduced in R2023aSee Also
impulse | impulseplot | step | stepplot