step
动态系统的阶跃响应
语法
说明
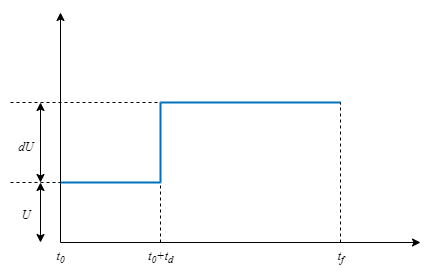
step 计算经过 td 个时间单位后,系统对于输入值从 U 阶跃变化到 U + dU 的阶跃响应。
其中,
t0 是仿真开始时间。
td 是阶跃延迟。
U 是基线输入值或偏置。
dU 是阶跃振幅。
默认情况下,该函数对 t0 = 0、U = 0、dU = 1 和 td = 0 应用阶跃。但是,您可以使用 RespConfig 配置这些值。您还可以指定初始状态 x (t0)。如果您未指定初始状态,step 会假定系统最初处于静止状态,输入电平为 U。
[ 指定用于计算阶跃响应的其他选项,例如阶跃振幅或输入偏移量。使用 y,tOut] = step(___,config)RespConfig 创建 config。
示例
绘制由以下传递函数表示的连续时间系统的阶跃响应。
对于此示例,请创建一个表示传递函数的 tf 模型。同样,您可以绘制其他动态系统模型类型的阶跃响应,例如零极点增益 (zpk) 模型或状态空间 (ss) 模型。
sys = tf(4,[1 2 10]);
绘制阶跃响应。
step(sys)
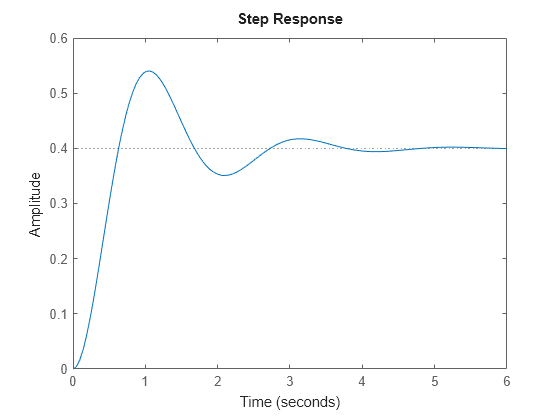
step 图自动包含一条水平点线,指示稳态响应。在 MATLAB® 图窗窗口中,您可以右键点击绘图以查看其他阶跃响应特征,例如峰值响应和稳定时间。有关这些特性的详细信息,请参阅 stepinfo (Control System Toolbox)。
绘制一个离散时间系统的阶跃响应。该系统的采样时间为 0.2 秒,由以下状态空间矩阵表示。
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;创建状态空间模型并绘制其阶跃响应。
sys = ss(A,B,C,D,0.2); step(sys)
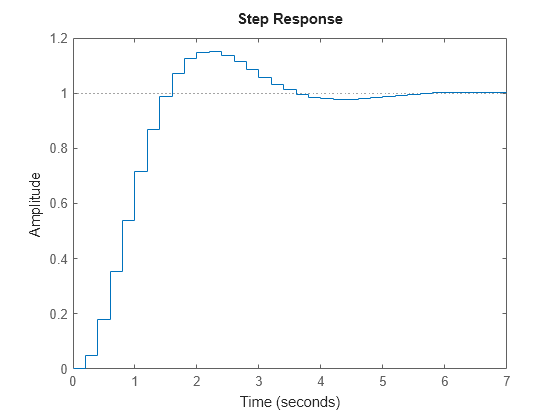
阶跃响应反映了模型的离散化,显示每 0.2 秒计算一次的响应。
检查以下传递函数的阶跃响应。
sys = zpk(-1,[-0.2+3j,-0.2-3j],1) * tf([1 1],[1 0.05])
sys =
(s+1)^2
----------------------------
(s+0.05) (s^2 + 0.4s + 9.04)
Continuous-time zero/pole/gain model.
Model Properties
step(sys)
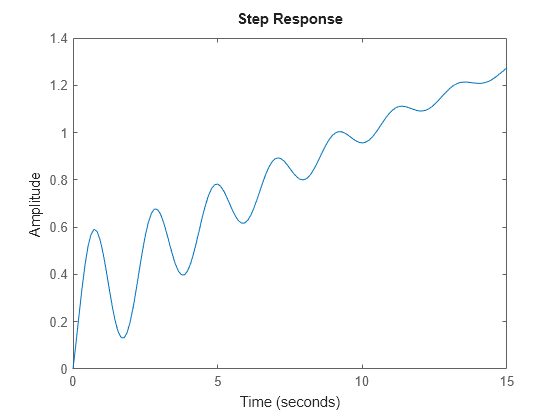
默认情况下,step 会选择一个结束时间,在该时间处显示响应趋向的稳定状态。然而,该系统具有快速瞬态响应,基于这个时间尺度,该响应被掩盖了。为了更仔细地观察瞬态响应,请将阶跃图限制为 t = 15 秒。
step(sys,15)
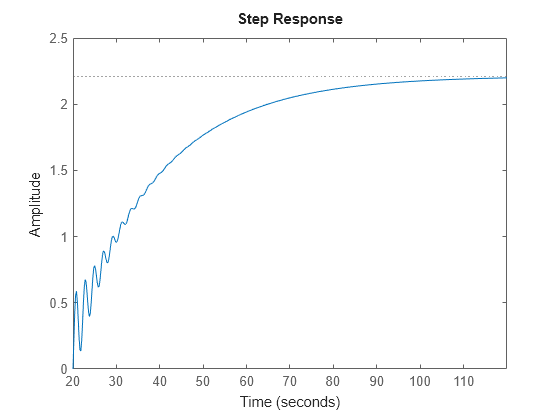
您也可以指定要检查阶跃响应的确切时间,前提是这些时间之间有恒定的区间。例如,检查从瞬态结束到系统达到稳定状态的响应。
t = 20:0.2:120; step(sys,t)
尽管此图从 t = 20 开始,但 step 始终在 t = 0 处应用阶跃输入。
假设有以下二阶状态空间模型:
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
此模型有两个输入和一个输出,因此它有两个通道:从第一个输入到输出的通道,以及从第二个输入到输出的通道。每个通道都有自己的阶跃响应。
当您使用 step 时,它会计算所有通道的响应。
step(sys)
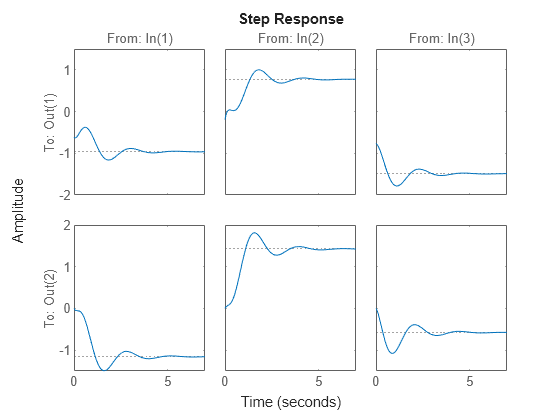
左图显示了第一个输入通道的阶跃响应,右图显示了第二个输入通道的阶跃响应。每当您使用 step 绘制 MIMO 模型的响应时,它都会生成一个绘图数组,表示该模型的所有 I/O 通道。例如,创建一个具有五个状态、三个输入和两个输出的随机状态空间模型,并绘制其阶跃响应。
sys = rss(5,2,3); step(sys)
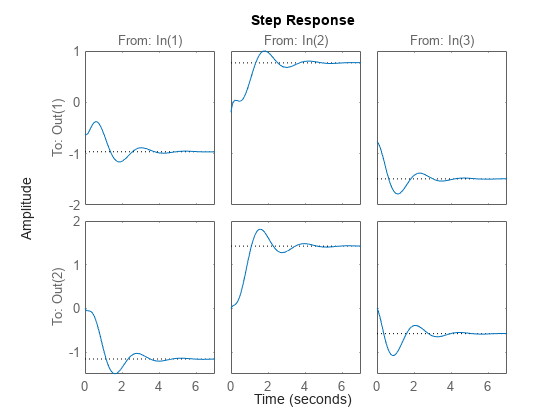
在 MATLAB 图窗窗口中,您可以右键点击绘图并选择 I/O 选择器,将绘图限制为通道的子集。
使用 step,您可以在同一轴上绘制多个动态系统的响应。例如,将系统的闭环响应与 PI 控制器和 PID 控制器的闭环响应进行比较。创建系统的传递函数并调节控制器。
H = tf(4,[1 2 10]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
形成闭环系统并绘制其阶跃响应。
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1); step(sys1,sys2) legend('PI','PID','Location','SouthEast')
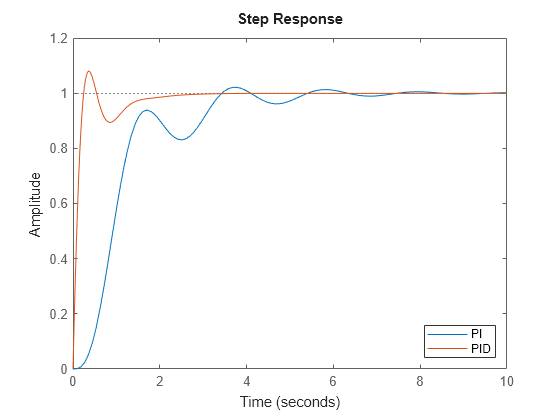
默认情况下,step 会为您绘制的每个系统选择不同的颜色。您可以使用 LineSpec 输入参量指定颜色和线型。
step(sys1,'r--',sys2,'b') legend('PI','PID','Location','SouthEast')
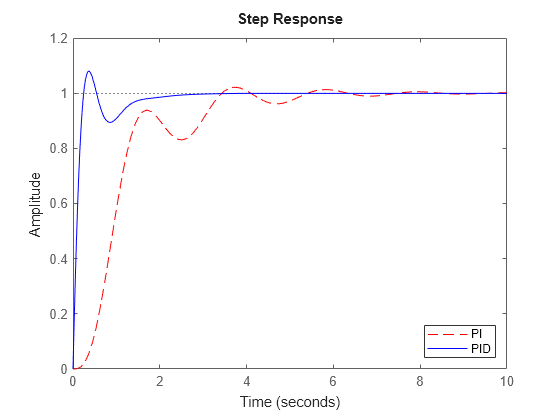
第一个 LineSpec 'r--' 为 PI 控制器的响应指定红色虚线。第二个 LineSpec 'b' 为 PID 控制器的响应指定蓝色实线。图例反映了所指定的颜色和线型。如需更多绘图自定义选项,请使用 stepplot。
“比较多个系统的响应”示例说明了如何在一个轴上绘制多个单独系统的响应。当有多个动态系统排列在模型数组中时,step 会同时绘制所有这些系统的响应。
创建模型数组。对于此示例,请使用具有不同固有频率的二阶传递函数的一维数组。首先,为模型数组预分配内存。以下命令会创建一个行向量,其中包含 5 个零增益 SISO 传递函数。前两个维度表示模型输出和输入。其余维度是数组维度。
sys = tf(zeros(1,1,1,5));
填充该数组。
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
(有关模型数组以及如何创建模型数组的详细信息,请参阅Model Arrays (Control System Toolbox)。)绘制数组中所有模型的阶跃响应。
step(sys)
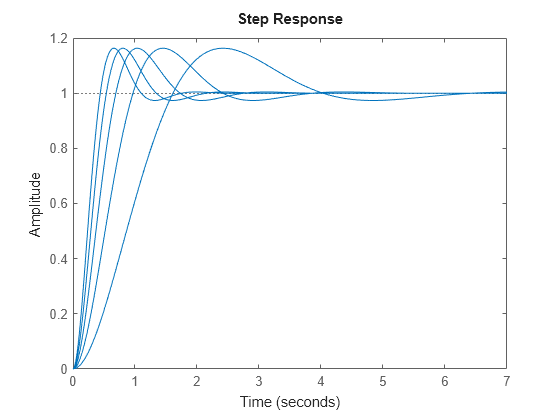
step 对数组中所有条目的响应使用相同的线型。区分各条目的一种方法是使用动态系统模型的 SamplingGrid 属性将数组中的每个条目与对应的 w0 值相关联。
sys.SamplingGrid = struct('frequency',w0);现在,当您在 MATLAB 图窗窗口中绘制响应时,您可以点击一条轨迹来查看它对应的频率值。
当您为 step 提供输出参量时,该函数会返回响应数据数组。对于 SISO 系统,响应数据以列向量形式返回,其长度等于对响应进行采样的时间点的数目。您可以提供时间点的向量 t,也可以允许 step 根据系统动态特性为您选择时间点。例如,提取 SISO 系统在 t = 0 和 t = 5 秒之间的 101 个时间点的阶跃响应。
sys = tf(4,[1 2 10]); t = 0:0.05:5; y = step(sys,t); size(y)
ans = 1×2
101 1
对于 MIMO 系统,响应数据以 N×Ny×Nu 维度的数组形式返回,其中 Ny 和 Nu 是动态系统的输出数目和输入数目。例如,假设有以下状态空间模型,它表示具有两个输入、一个输出的系统。
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
提取该系统在 t = 0 和 t = 20 秒之间的 200 个时间点的阶跃响应。
t = linspace(0,20,200); y = step(sys,t); size(y)
ans = 1×3
200 1 2
y(:,i,j) 是包含在时间 t 处从第 j 个输入到第 i 个输出的阶跃响应的列向量。例如,提取从第二个输入到输出的阶跃响应。
y12 = y(:,1,2); plot(t,y12)
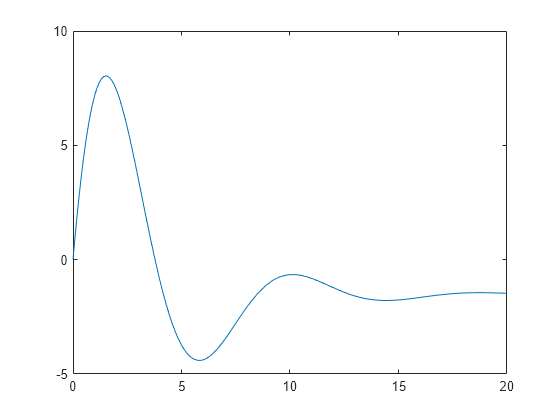
创建一个具有延迟的反馈环,并绘制其阶跃响应。
s = tf('s');
G = exp(-s) * (0.8*s^2+s+2)/(s^2+s);
sys = feedback(ss(G),1);
step(sys)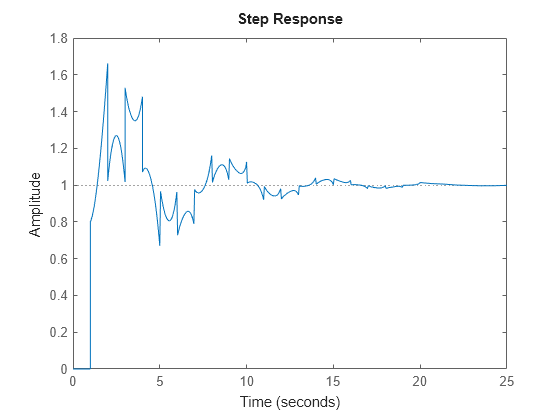
显示的系统阶跃响应是混沌的。具有内部延迟的系统的阶跃响应可能会表现出异常行为,例如反复跳变。此类行为是系统的一项特征,而不是软件异常。
默认情况下,step 会应用在 t = 0 时从 0 变为 1 的输入信号。要自定义振幅和偏置,请使用 RespConfig。例如,计算 SISO 状态空间模型对从 1 到 -1 再到 t = 0 时的信号的响应。
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;
sys = ss(A,B,C,D,0.2);
opt = RespConfig;
opt.Bias = 1;
opt.Amplitude = -2;
step(sys,opt)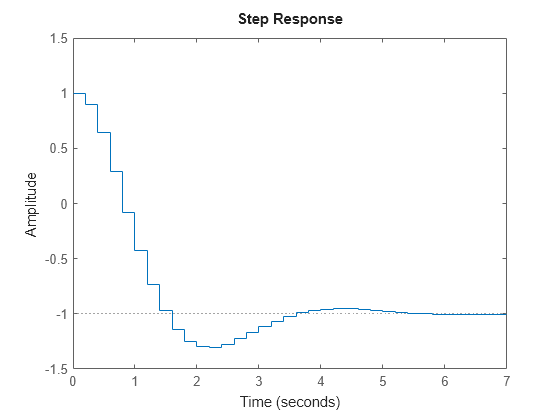
要获得对任意输入信号的响应,请使用 lsim (Control System Toolbox)。
将参数化辨识模型的阶跃响应与非参数化(经验)模型的阶跃响应进行比较。另请查看它们的 3 置信域。
加载数据。
load iddata1 z1
估计参数化模型。
sys1 = ssest(z1,4);
估计非参数化模型。
sys2 = impulseest(z1);
绘制阶跃响应以进行比较。
t = (0:0.1:10)'; [y1, ~, ~, ysd1] = step(sys1,t); [y2, ~, ~, ysd2] = step(sys2,t); plot(t, y1, 'b', t, y1+3*ysd1, 'b:', t, y1-3*ysd1, 'b:') hold on plot(t, y2, 'g', t, y2+3*ysd2, 'g:', t, y2-3*ysd2, 'g:')

计算辨识时间序列模型的阶跃响应。
时间序列模型,也称为信号模型,是一种没有测量输入信号的模型。这种模型的阶跃图使用其(未经测量的)噪声通道作为应用阶跃信号的输入通道。
加载数据。
load iddata9;估计时间序列模型。
sys = ar(z9, 4);
sys 是 A y(t) = e(t) 形式的模型,其中 e(t) 表示噪声通道。对于阶跃响应的计算,e(t) 被视为输入通道,并被命名为 e@y1。
绘制阶跃响应。
step(sys)
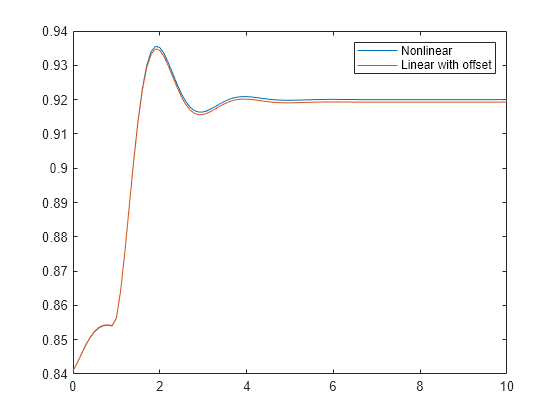
通过比较线性模型和非线性模型的小振幅阶跃响应来验证非线性 ARX 模型的线性化。
加载数据。
load iddata2 z2;
估计非线性 ARX 模型。
nlsys = nlarx(z2,[4 3 10],idTreePartition,'custom',... {'sin(y1(t-2)*u1(t))+y1(t-2)*u1(t)+u1(t).*u1(t-13)',... 'y1(t-5)*y1(t-5)*y1(t-1)'},'nlr',[1:5, 7 9]);
确定 nlsys 对应于稳态输入值 1 的均衡工作点。
u0 = 1;
[X,~,r] = findop(nlsys, 'steady', 1);
y0 = r.SignalLevels.Output;获得 nlsys 在此工作点处的线性逼近。
sys = linearize(nlsys,u0,X);
通过将 sys 的小振幅阶跃响应与 nlsys 的小振幅阶跃响应进行比较来验证其有效性。
非线性系统 nlsys 在由 (u0,y0) 决定的均衡水平下工作。围绕此稳态引入大小为 0.1 的阶跃扰动,并计算对应的响应。
opt = RespConfig; opt.InputOffset = u0; opt.Amplitude = 0.1; t = (0:0.1:10)'; ynl = step(nlsys, t, opt);
线性系统 sys 表示输入中的扰动与输出中的对应扰动之间的关系。它不知道非线性系统的均衡值。
绘制线性系统的阶跃响应。
opt = RespConfig; opt.Amplitude = 0.1; yl = step(sys, t, opt);
将稳态偏移量 y0 添加到线性系统的响应中,并绘制响应。
plot(t, ynl, t, yl+y0) legend('Nonlinear', 'Linear with offset')
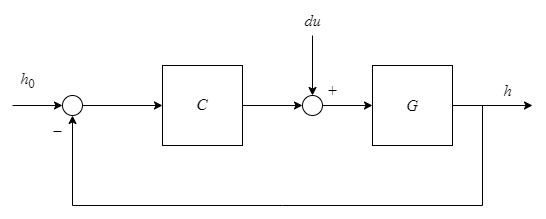
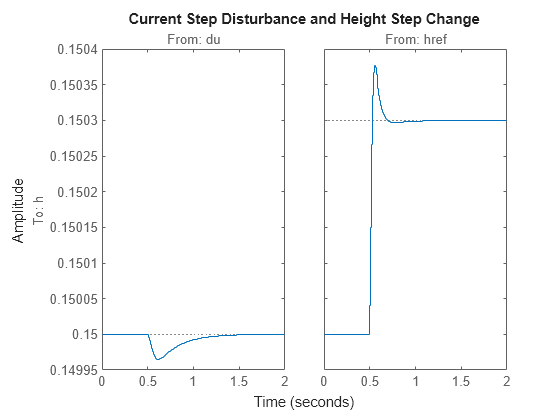
计算并绘制 LPV (lpvss (Control System Toolbox)) 模型的阶跃响应。此示例对 fcnMaglev.m 中定义的悬浮球模型对扰动 的闭环阶跃响应进行仿真。
创建模型并将其离散化。
hmin = 0.05; hmax = 0.25; h0 = (hmin+hmax)/2; Ts = 0.01; Glpv = lpvss("h",@fcnMaglev,0,0,h0); Glpvd = c2d(Glpv,Ts,"tustin");
对 LPV 模型的三个高度值进行采样,并调节 PID 控制器。
hpid = linspace(hmin,hmax,3);
[Ga,Goffset] = sample(Glpvd,[],hpid);
wc = 50;
Ka = pidtune(Ga,"pidf",wc);
Ka.Tf = 0.01;创建增益调度 PID 控制器。
Ka.SamplingGrid = struct("h",hpid); Koffset = struct("y",{Goffset.u}); Clpv = ssInterpolant(ss(Ka),Koffset);
创建闭环模型。
CL = feedback(Glpvd*[1,Clpv],1,2,1);
CL.InputName = {'du';'href'};
CL.OutputName = "h";获取 = 的稳态电流,以计算被控对象输入处的阶跃扰动的适当大小。
[~,~,~,~,~,~,~,u0] = Glpv.DataFunction(0,h0);
计算并绘制对输入扰动和参考阶跃变化的响应。设置基线输入信号 = 0 和 = 以指定起始稳态条件。
t = 0:Ts:2; pFcn = @(k,x,u) x(1); Config = RespConfig( ... Bias=[0;h0], ... Amplitude=0.2*[u0;h0]*Ts, ... Delay=0.5, ... InitialParameter=h0); step(CL,t,pFcn,Config) title("Current Step Disturbance and Height Step Change")
创建一个具有复系数的状态空间模型。
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
计算系统的阶跃响应。
[y,t] = step(sys);
得到的响应数据包含复数输出值。
y
y = 369×1 complex
0.0000 + 0.0000i
0.0018 + 0.0075i
0.0079 + 0.0286i
0.0191 + 0.0612i
0.0360 + 0.1033i
0.0588 + 0.1531i
0.0874 + 0.2089i
0.1215 + 0.2690i
0.1609 + 0.3320i
0.2048 + 0.3969i
0.2528 + 0.4624i
0.3041 + 0.5279i
0.3580 + 0.5925i
0.4138 + 0.6558i
0.4708 + 0.7173i
⋮
输入参数
输出参量
提示
算法
为了获得没有内部延迟的连续时间模型的样本,step 将此类模型转换为状态空间模型,并通过对输入使用零阶保持使这些模型离散化。step 根据系统动态特性自动选择此离散化的采样时间,除非您以 t = T0:dt:Tf 形式提供输入时间向量 t。在这种情况下,step 使用 dt 作为采样时间。生成的仿真时间步 tOut 是以间隔 dt 等间隔采样的。
对于具有内部延迟的系统,Control System Toolbox™ 软件使用变步长求解器。因此,时间步 tOut 不是等间隔采样的。
参考
[1] L.F. Shampine and P. Gahinet, "Delay-differential-algebraic equations in control theory," Applied Numerical Mathematics, Vol. 56, Issues 3–4, pp. 574–588.