denoiseNGMeet
Denoise hyperspectral images using non-local meets global approach
Description
Add-On Required: This feature requires the Hyperspectral Imaging Library for Image Processing Toolbox add-on.
outputData = denoiseNGMeet(inputData)
outputData = denoiseNGMeet(inputData,Name=Value)
Note
The Hyperspectral Imaging Library for Image Processing Toolbox™ requires desktop MATLAB®, as MATLAB Online™ and MATLAB Mobile™ do not support the library.
Examples
Read hyperspectral data into the workspace.
hcube = imhypercube("paviaU.hdr");Normalize the input data and add Gaussian noise to the normalized input data.
datacube = gather(hcube);
datacube = rescale(datacube);
datacube = imnoise(datacube,"Gaussian",0,0.005);
inputData = imhypercube(datacube,hcube.Wavelength);Denoise the noisy hyperspectral data using NGmeet method.
outputData = denoiseNGMeet(inputData);
Estimate RGB images for the input, noisy, and the denoised output datacube. Increase the image contrast by applying contrast stretching.
originalImg = colorize(hcube,Method="rgb",ContrastStretching=true); noisyImg = colorize(inputData,Method="rgb",ContrastStretching=true); denoisedImg = colorize(outputData,Method="rgb",ContrastStretching=true);
Display RGB images of the original, noisy, and denoised data.
figure
montage({originalImg,noisyImg,denoisedImg})
title("Input Image | Noisy Image | Denoised Image");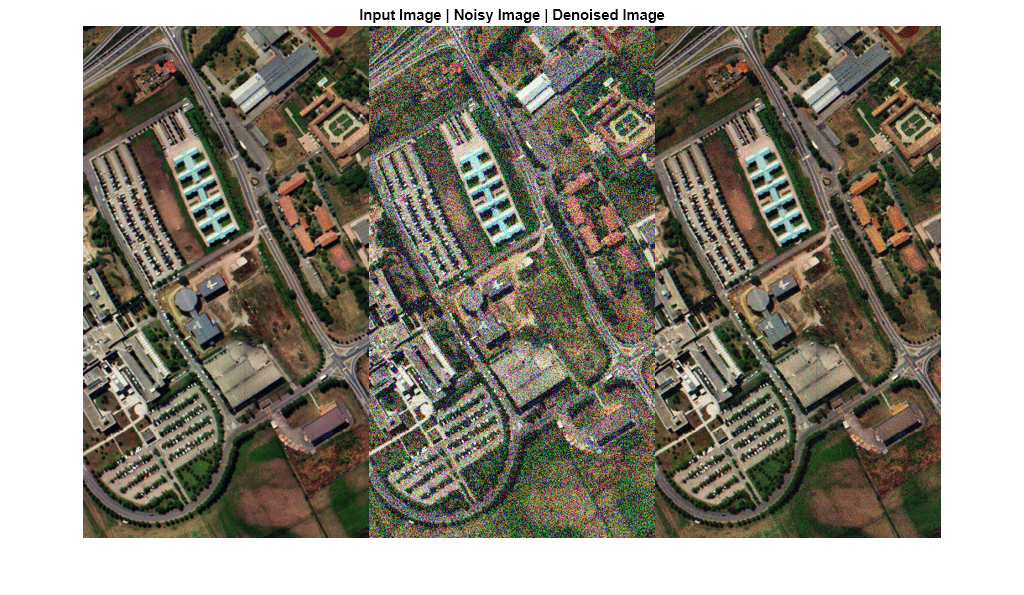
Read hyperspectral data into the workspace.
hcube = imhypercube("paviaU.hdr");Normalize the input data and add Gaussian noise to the normalized input data.
datacube = gather(hcube);
datacube = rescale(datacube);
datacube = imnoise(datacube,"Gaussian",0,0.005);
inputData = imhypercube(datacube,hcube.Wavelength);Denoise the noisy hyperspectral data by using the NGmeet method. Set the smoothing parameter value to 0.01 and the number of iterations to 2.
outputData = denoiseNGMeet(inputData,Sigma=0.01,NumIterations=2);
Estimate RGB images for the input, noisy, and the denoised output datacube. Increase the image contrast by applying contrast stretching.
originalImg = colorize(hcube,Method="rgb",ContrastStretching=true); noisyImg = colorize(inputData,Method="rgb",ContrastStretching=true); denoisedImg = colorize(outputData,Method="rgb",ContrastStretching=true);
Display RGB images of the original, noisy, and denoised data.
figure
montage({originalImg,noisyImg,denoisedImg})
title("Input Image | Noisy Image | Denoised Image");
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The NGMeet method estimates the denoised data cube by using these steps. For each iteration, i
Compute spectral low-rank approximation of the noisy input data (Yi) by using singular value decomposition. The approximation results in a reduced data cube (Mi) and the related orthogonal basis Ai.
Perform spatial denoising of the reduced data cube Mi by using non-local similarity filtering. You can control the degree of smoothing by specifying the smoothing parameter
'Sigma'.Perform inverse projection. Map the denoised reduced data cube Mi to original space by using the orthogonal basis Ai. The result is the denoised output (Xi) obtained at iteration i.
Perform iterative regularization. Update the noisy input data, Yi+1 = λXi + (1-λ)Yi.
Repeat steps 1 to 4, for the specified number of iterations. The final value Xi is the denoised hyperspectral data.
References
[1] He, Wei, Quanming Yao, Chao Li, Naoto Yokoya, and Qibin Zhao. “Non-Local Meets Global: An Integrated Paradigm for Hyperspectral Denoising.” In 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 6861–70. Long Beach, CA, USA: IEEE, 2019. https://doi.org/10.1109/CVPR.2019.00703.