watershed
分水岭变换
说明
分水岭变换将图像视为一个曲面,其中亮像素表示较高处,暗像素表示较低处,从而找出图像中的“汇水盆地”或“分水岭脊线”。分水岭变换可用于将感兴趣的连续区域分割成不同对象。
示例
创建一个包含两个重叠圆形目标的二值图像。显示图像。
center1 = -40;
center2 = -center1;
dist = sqrt(2*(2*center1)^2);
radius = dist/2 * 1.4;
lims = [floor(center1-1.2*radius) ceil(center2+1.2*radius)];
[x,y] = meshgrid(lims(1):lims(2));
bw1 = sqrt((x-center1).^2 + (y-center1).^2) <= radius;
bw2 = sqrt((x-center2).^2 + (y-center2).^2) <= radius;
bw = bw1 | bw2;
imshow(bw)
title('Binary Image with Overlapping Objects')
计算二值图像反色的距离变换。输出图像中每个像素的值是该像素与 bw 中最近的非零像素之间的距离。
D = bwdist(~bw);
imshow(D,[])
title('Distance Transform of Binary Image')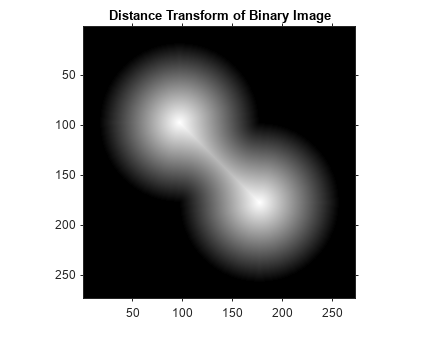
对距离变换图像取反色,以便在经过分水岭变换后, 亮像素表示较高处,暗像素表示较低处。
D = -D;
imshow(D,[])
title('Complement of Distance Transform')
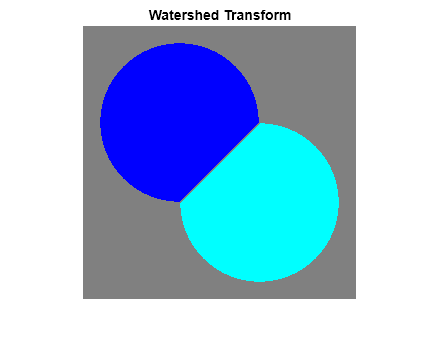
计算分水岭变换。将 ROI 外的像素设置为 0。
L = watershed(D); L(~bw) = 0;
将生成的标签矩阵显示为 RGB 图像。
rgb = label2rgb(L,'jet',[.5 .5 .5]); imshow(rgb) title('Watershed Transform')
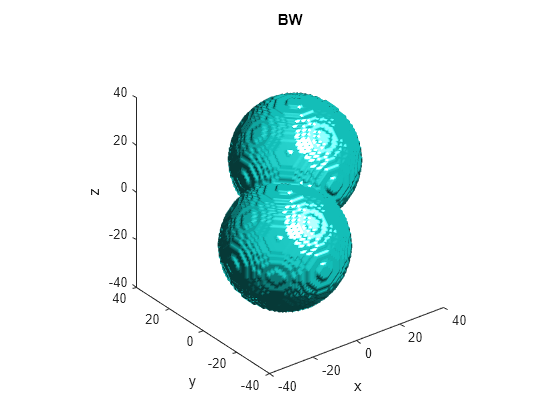
生成一个包含两个重叠球体的三维二值图像。
center1 = -10; center2 = -center1; dist = sqrt(3*(2*center1)^2); radius = dist/2 * 1.4; lims = [floor(center1-1.2*radius) ceil(center2+1.2*radius)]; [x,y,z] = meshgrid(lims(1):lims(2)); bw1 = sqrt((x-center1).^2 + (y-center1).^2 + ... (z-center1).^2) <= radius; bw2 = sqrt((x-center2).^2 + (y-center2).^2 + ... (z-center2).^2) <= radius; bw = bw1 | bw2; figure, isosurface(x,y,z,bw,0.5), axis equal, title('BW') xlabel x, ylabel y, zlabel z xlim(lims), ylim(lims), zlim(lims) view(3), camlight, lighting gouraud
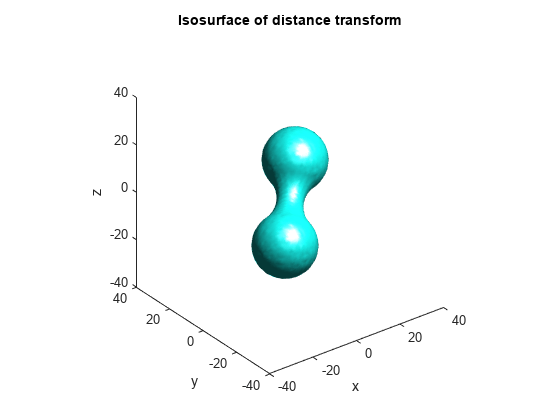
计算距离变换。
D = bwdist(~bw); figure, isosurface(x,y,z,D,radius/2), axis equal title('Isosurface of distance transform') xlabel x, ylabel y, zlabel z xlim(lims), ylim(lims), zlim(lims) view(3), camlight, lighting gouraud
对距离变换取反色,强制非目标像素为 Inf,然后计算分水岭变换。
D = -D; D(~bw) = Inf; L = watershed(D); L(~bw) = 0; figure isosurface(x,y,z,L==1,0.5) isosurface(x,y,z,L==2,0.5) axis equal title('Segmented objects') xlabel x, ylabel y, zlabel z xlim(lims), ylim(lims), zlim(lims) view(3), camlight, lighting gouraud

您可以隐藏低浅的区域最小值以避免在分水岭分割期间出现过分割。
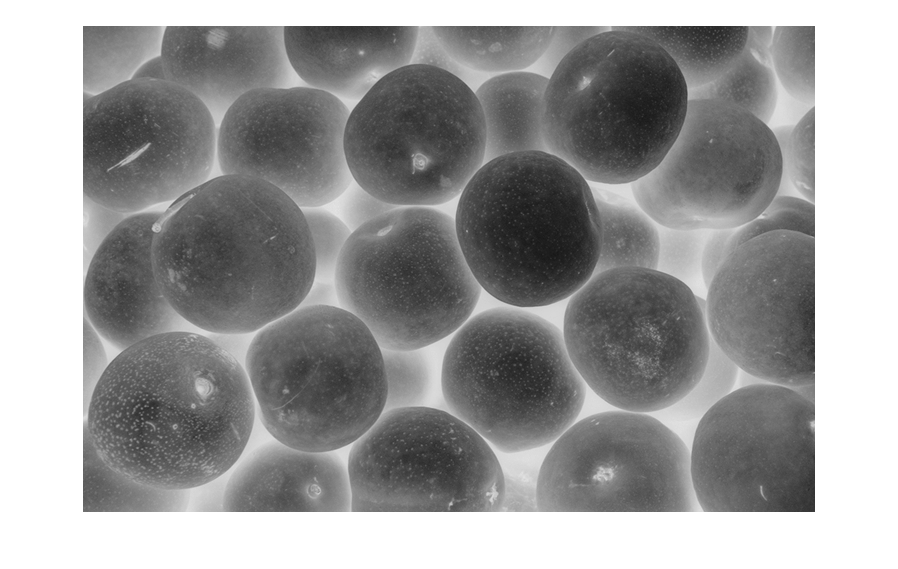
加载一个要分割的 RGB 图像。将该图像转换为灰度并显示。每个梨的中心是明亮的,对应于区域最大值。
RGB = imread("pears.png");
I = im2gray(RGB);
imshow(I)
在分水岭分割中,图像类似于由分水岭线和汇水盆地组成的曲面。当水流入该曲面时,它会汇集在汇水盆地中。在灰度图像中,局部最小值是汇水盆地。为了分割梨,请反转图像以使梨的中心成为区域最小值。
Icomp = imcomplement(I); imshow(Icomp)
将反转后的图像显示为三维曲面,其中每个像素的第三个维度是其强度值。每个梨的较深区域具有尖底,表明有许多低浅的区域最小值,就像水可以汇入的汇水盆地。
surf(Icomp,EdgeColor="none")
colormap(gray)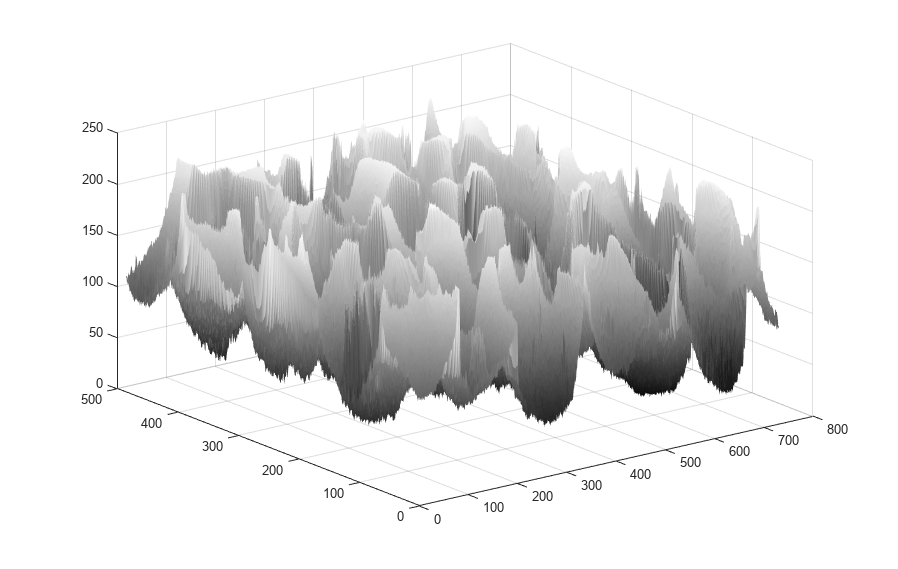
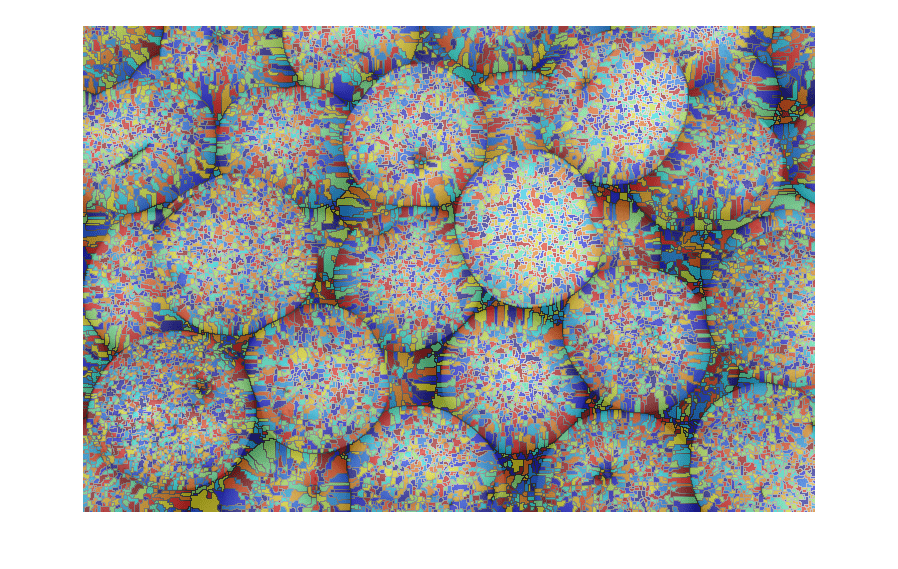
分割未滤波的图像并将结果显示为标签叠加。图像出现过分割,意味着有许多小掩膜而不是每个梨对应一个掩膜。
L = watershed(Icomp); overlay = labeloverlay(I,L); imshow(overlay)
通过应用 H 最小值变换隐藏低浅的最小值。h 的值已通过试错法确定。更改该值以查看 h 值如何影响分割结果。
h =  30;
Ifilt = imhmin(Icomp,h);
30;
Ifilt = imhmin(Icomp,h);将滤波后的图像显示为三维曲面。
surf(Ifilt,EdgeColor="none")
colormap(gray)
分割滤波后的图像并显示结果。图像前景中的每个梨大约都对应一个掩膜。
Lfilt = watershed(Ifilt); overlayfilt = labeloverlay(I,Lfilt); imshow(overlayfilt)

输入参数
输入图像,指定为任意维度的数值或逻辑数组。
数据类型: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
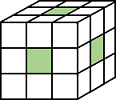
像素连通性,指定为下表中的值之一。对于二维图像,默认连通性是 8,对于三维图像,默认连通性是 26。
值 | 意义 | |
|---|---|---|
二维连通 | ||
| 如果像素的边缘相互接触,则这些像素具有连通性。像素的邻域是水平或垂直方向上的相邻像素。 |
当前像素以灰色显示。 |
| 如果像素的边缘或角相互接触,则这些像素具有连通性。像素的邻域是水平、垂直或对角线方向上的相邻像素。 |
当前像素以灰色显示。 |
三维连通 | ||
| 如果像素的面接触,则这些像素具有连通性。像素的邻域是符合以下条件的相邻像素:
|
当前像素以灰色显示。 |
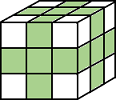
| 如果像素的面或边缘接触,则这些像素具有连通性。像素的邻域是符合以下条件的相邻像素:
|
当前像素是立方体的中心。 |
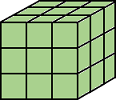
| 如果像素的面、边缘或角接触,则这些像素具有连通性。像素的邻域是符合以下条件的相邻像素:
|
当前像素是立方体的中心。 |


对于更高的维度,watershed 使用默认值 conndef(ndims(A),"maximal")
注意
如果指定非默认连通性,则图像边缘上的像素可能不被视为边框像素。例如,如果 conn = [0 0 0; 1 1 1; 0 0 0],则第一行和最后一行的元素不被视为边框像素,因为根据连通性定义,它们未连接到图像外部的区域。
数据类型: double | logical
输出参量
提示
为了防止过分分割,请在使用
watershed函数之前,使用imhmin函数去除图像中低浅的最小值。
算法
watershed 使用 Fernand Meyer 算法 [1]。
参考
[1] Meyer, Fernand, "Topographic distance and watershed lines,” Signal Processing , Vol. 38, July 1994, pp. 113-125.
扩展功能
版本历史记录
在 R2006a 之前推出另请参阅
bwlabel | bwlabeln | bwdist | regionprops | imhmin