LOAMPoints
Description
The LOAMPoints object enables you to store lidar odometry and
mapping (LOAM) feature points for registration. Use the detectLOAMFeatures
function to detect feature points and store them in a LOAMPoints object.
Use the pcregisterloam
function to find the transformation between two LOAMPoints
objects.
Creation
Description
Input Arguments
Properties
Object Functions
downsampleLessPlanar | Downsample less planar surface points |
transformPointsForward | Apply forward geometric transformation to points |
show | Visualize LOAM feature points |
Examples
Load an organized lidar point cloud from a MAT file into the workspace.
ld = load("drivingLidarPoints.mat");
ptCloudOrg = ld.ptCloud;Detect lidar odometry and mapping (LOAM) feature points.
points = detectLOAMFeatures(ptCloudOrg);
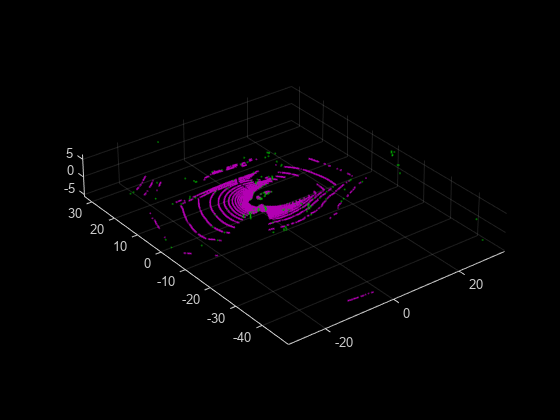
Visualize the LOAM points.
figure show(points)
References
[1] Zhang, Ji, and Sanjiv Singh. “LOAM: Lidar Odometry and Mapping in Real-Time.” In Robotics: Science and Systems X. Robotics: Science and Systems Foundation, 2014. https://doi.org/10.15607/RSS.2014.X.007.