readFrame
Syntax
Description
ptCloud = readFrame(ousterReader)pointCloud object.
ptCloud = readFrame(ousterReader,frameNumber)
ptCloud = readFrame(ousterReader,frameTime)frameTime.
[
returns a structure, ptCloud,pcAttributes] = readFrame(___)pcAttributes, containing attributes for each point
using any combination of input arguments from previous syntaxes.
Examples
Download a ZIP file containing an Ouster packet capture (PCAP) file and the corresponding calibration file, and then unzip the file.
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/ouster_RoadIntersection.zip"); saveFolder = fileparts(zipFile); pcapFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'ouster_RoadIntersection.pcap']; calibFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'OS1-128U.json']; if ~(exist(pcapFileName,"file") && exist(calibFileName,"file")) unzip(zipFile,saveFolder); end
Create an ousterFileReader object.
ousterReader = ousterFileReader(pcapFileName,calibFileName);
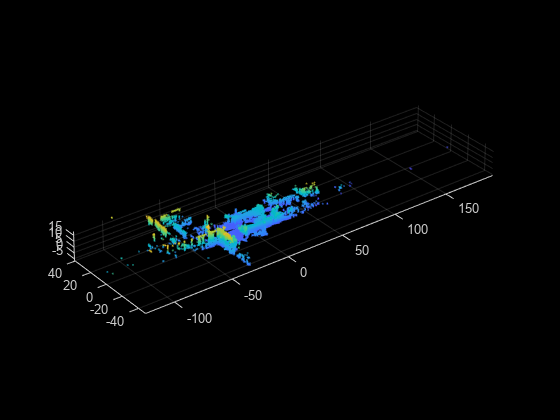
Read the fifth frame of the Ouster PCAP point cloud data.
frameNumber = 5; ptCloud = readFrame(ousterReader,frameNumber);
Display the point cloud.
pcshow(ptCloud)
Download a ZIP file containing an Ouster packet capture (PCAP) file and the corresponding calibration file, and then unzip the file.
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/ouster_RoadIntersection.zip"); saveFolder = fileparts(zipFile); pcapFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'ouster_RoadIntersection.pcap']; calibFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'OS1-128U.json']; if ~(exist(pcapFileName,"file") && exist(calibFileName,"file")) unzip(zipFile,saveFolder); end
Create an ousterFileReader object.
ousterReader = ousterFileReader(pcapFileName,calibFileName);
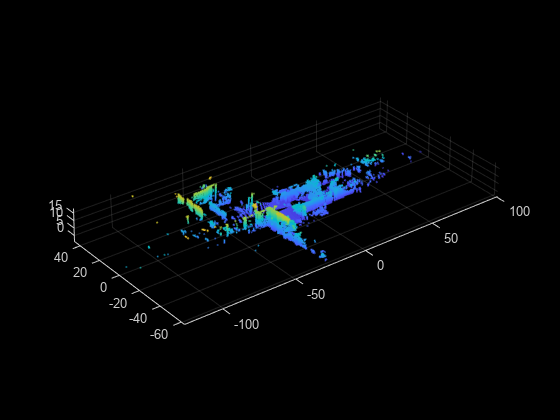
Read the first Ouster PCAP point cloud frame from 3 seconds after start time.
frameTime = ousterReader.StartTime + seconds(3); [ptCloud,pcatt] = readFrame(ousterReader,frameTime);
Display the point cloud.
pcshow(ptCloud)
Download a ZIP file containing an Ouster packet capture (PCAP) file and the corresponding calibration file, and then unzip the file.
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/ouster_RoadIntersection.zip"); saveFolder = fileparts(zipFile); pcapFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'ouster_RoadIntersection.pcap']; calibFileName = [saveFolder filesep 'ouster_RoadIntersection' filesep 'OS1-128U.json']; if ~(exist(pcapFileName,"file") && exist(calibFileName,"file")) unzip(zipFile,saveFolder); end
Create an ousterFileReader object.
ousterReader = ousterFileReader(pcapFileName,calibFileName);
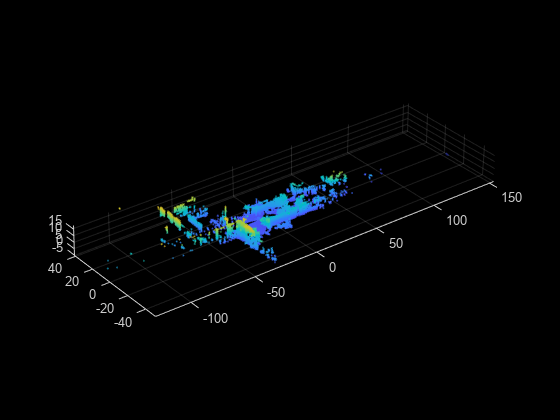
Read the strongest return data from the tenth point cloud.
frameNumber = 10;
ptCloud = readFrame(ousterReader,frameNumber,ReadMode="strongest");Display the point cloud.
pcshow(ptCloud)
Input Arguments
Output Arguments
Version History
Introduced in R2022aSee Also
ousterFileReader | hasFrame | reset | velodyneFileReader | readFrame | hesaiFileReader | readFrame | pointCloud | pcshow