projectLidarPointsOnImage
Project lidar point cloud data onto image coordinate frame
Syntax
Description
imPts = projectLidarPointsOnImage(ptCloudIn,intrinsics,tform)tform, and a set of camera
intrinsic parameters, intrinsics. The output imPts
contains the 2-D coordinates of the projected points in the image frame.
imPts = projectLidarPointsOnImage(worldPoints,intrinsics,tform)
[___] = projectLidarPointsOnImage(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments in previous syntaxes. For example, Name,Value)'ImageSize',[250 400] sets
the size of the image on which to project the points to 250-by-400 pixels.
Examples
Load a MAT file containing a synchronized image and point cloud pair, the camera intrinsics and the lidar to camera transformation.
ld = load("sampleColoredPtCloud.mat");Extract the image and point cloud data.
I = ld.I; ptCloud = ld.ptCloud;
Downsample the point cloud data.
ptCloud = pcdownsample(ptCloud,"gridNearest",0.5);Visualize the image and point cloud data.
figure subplot(1,2,1) imshow(I) title("Image") subplot(1,2,2) pcshow(ptCloud) title("Point Cloud")
Get the camera intrinsics and the transformation from the lidar sensor to the camera.
intrinsics = ld.intrinsics; lidarToCameraTform = ld.lidarToCameraTform;
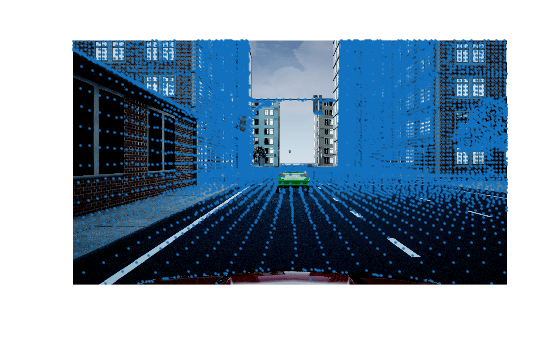
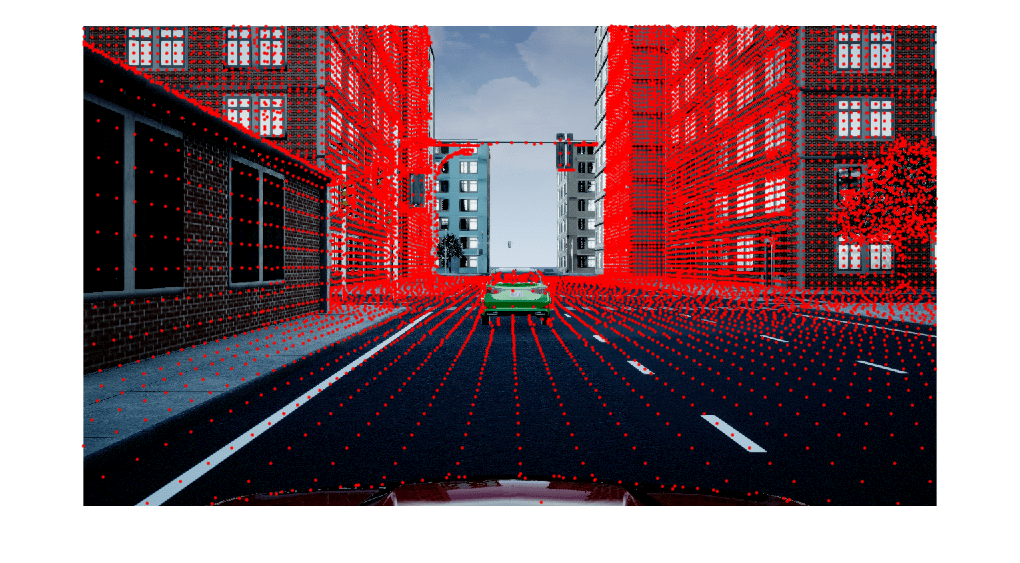
Project the point cloud into the image.
imPts = projectLidarPointsOnImage(ptCloud,intrinsics,lidarToCameraTform);
Overlay the projected points on the image.
figure imshow(I) hold on plot(imPts(:,1),imPts(:,2),".")