voxelRCNNObjectDetector
Description
Add-On Required: This feature requires the Lidar Toolbox Interface for OpenPCDet Library add-on.
The voxelRCNNObjectDetector object creates a voxel region-based
convolutional neural network (Voxel R-CNN) to detect 3-D objects in a lidar point cloud. Using
this object, you can:
Create a pretrained 3-D object detector by using a Voxel R-CNN deep learning network trained on the KITTI or PandaSet data set.
Detect 3-D objects in a lidar point cloud by using the
detectobject function.If you have training data, you can create an untrained
voxelRCNNObjectDetectorobject and use thetrainVoxelRCNNObjectDetectorfunction to train the network. Using this function, you can also perform transfer learning to retrain a pretrained network.
Creation
Syntax
Description
detector = voxelRCNNObjectDetector
To use this object, your system must have a CUDA® enabled NVIDIA® GPU. For information on the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
detector = voxelRCNNObjectDetector(weights)weights. Specify
weights as "kitti" to use a Voxel R-CNN
network trained on the KITTI data set. Specify weights as
"pandaset" to use a Voxel R-CNN network trained on the PandaSet
point cloud data set.
detector = voxelRCNNObjectDetector(weights,ModelName=modelName)ModelName property of the Voxel R-CNN object
detector.
detector = voxelRCNNObjectDetector(weights,classNames,anchorBoxes)
If you specify weights as "kitti" or
"pandaset", the function creates a pretrained network and
configures it to perform transfer learning using the specified set of classes. For
optimal results, train the detector on new training data before performing detection.
Use the trainVoxelRCNNObjectDetector function to train the
detector.
If you specify weights as "none", the
function creates an untrained Voxel R-CNN object detector. Use the
trainVoxelRCNNObjectDetector function to train the detector
before performing object detection.
detector = voxelRCNNObjectDetector(weights,classNames,anchorBoxes,Name=Value)ModelName, PointCloudRange, and
VoxelSize properties by using one or more name-value arguments.
For example,
voxelRCNNObjectDetector("kitti",classNames,anchorBoxes,ModelName="objectDetector")
creates a voxelRCNNObjectDetector object with the model name
"objectDetector".
Input Arguments
Properties
Object Functions
detect | Detect objects using Voxel R-CNN object detector |
Examples
Create a Voxel R-CNN object detector.
detector = voxelRCNNObjectDetector;
Read the input point cloud.
filename = "PandasetLidarData.pcd";
ptCloud = pcread(filename);Run the pretrained Voxel R-CNN object detector on the input point cloud.
[bboxes,scores,labels] = detect(detector,ptCloud);
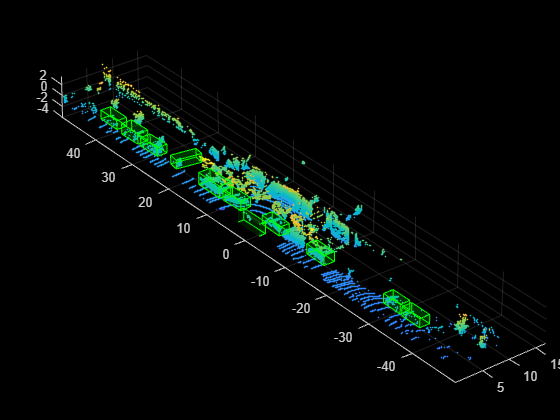
Display the detected bounding boxes. For better visualization, select a region of interest, roi, from the point cloud data.
roi = [0.0 89.12 -49.68 49.68 -5.0 5.0]; indices = findPointsInROI(ptCloud,roi); figure ax = pcshow(select(ptCloud,indices).Location); zoom(ax,1.5) showShape("cuboid",bboxes,Parent=ax,Color="green",Opacity=0.1,LineWidth=0.5);
References
[1] Deng, Jiajun, Shaoshuai Shi, Peiwei Li, Wengang Zhou, Yanyong Zhang, and Houqiang Li. “Voxel R-CNN: Towards High Performance Voxel-Based 3D Object Detection.” Proceedings of the AAAI Conference on Artificial Intelligence 35, no. 2 (May 18, 2021): 1201–9. https://doi.org/10.1609/aaai.v35i2.16207
[2] Geiger, Andreas, Philip Lenz, and Raquel Urtasun. “Are We Ready for Autonomous Driving? The KITTI Vision Benchmark Suite.” In 2012 IEEE Conference on Computer Vision and Pattern Recognition, 3354–61, 2012. https://doi.org/10.1109/CVPR.2012.6248074.
Version History
Introduced in R2024b