Code Generation for Lidar Object Detection Using PointPillars Deep Learning
This example shows how to generate CUDA® MEX for a PointPillars object detector. For more information, see Lidar 3-D Object Detection Using PointPillars Deep Learning example from the Lidar Toolbox™.
Third-Party Prerequisites
Required
CUDA enabled NVIDIA® GPU and compatible driver.
Optional
For non-MEX builds such as static and dynamic libraries or executables, this example has the following additional requirements.
NVIDIA CUDA toolkit.
NVIDIA cuDNN library.
Environment variables for the compilers and libraries. For more information, see Third-Party Hardware (GPU Coder) and Setting Up the Prerequisite Products (GPU Coder).
Verify GPU Environment
To verify that the compilers and libraries for running this example are set up correctly, use the coder.checkGpuInstall (GPU Coder) function.
envCfg = coder.gpuEnvConfig('host'); envCfg.DeepLibTarget = 'cudnn'; envCfg.DeepCodegen = 1; envCfg.Quiet = 1; coder.checkGpuInstall(envCfg);
Pretrained PointPillars Network
Load the pretrained pointPillarsObjectDetector trained in the Lidar 3-D Object Detection Using PointPillars Deep Learning example. To train the detector yourself, see Lidar 3-D Object Detection Using PointPillars Deep Learning.
matFile = 'pretrainedPointPillarsDetector.mat'; pretrainedDetector = load('pretrainedPointPillarsDetector.mat','detector'); detector = pretrainedDetector.detector;
pointpillarsDetect Entry-Point Function
The pointpillarsDetect entry-point function takes in the point cloud and confidence threshold as input and passes them to a trained pointPillarsObjectDetector for prediction through the pointpillarDetect function. The pointpillarsDetect function loads the detector object from the MAT file into a persistent variable and reuses the persistent object for subsequent prediction calls.
type('pointpillarsDetect.m')function [bboxes,scores,labels] = pointpillarsDetect(matFile,dataLoc,dataInt,threshold)
% Predict the output of network and extract the confidence, x, y,
% width, height, and class.
% load the deep learning network for prediction
persistent pointPillarObj;
if isempty(pointPillarObj)
pointPillarObj = coder.loadDeepLearningNetwork(matFile);
end
ptCloud = pointCloud(dataLoc,'Intensity',dataInt);
[bboxes,scores,labels] = pointPillarObj.detect(ptCloud,'Threshold',threshold);
end
Evaluate the Detector for Object Detection
Read the point cloud.
pc = pcread('pandasetDrivingData.pcd');Use the detect method on the pretrained detector.
confidenceThreshold = 0.7; [bboxes,~,labels] = detect(detector,pc,'Threshold',confidenceThreshold); bboxesCar = bboxes(labels == 'Car',:); bboxesTruck = bboxes(labels == 'Truck',:);
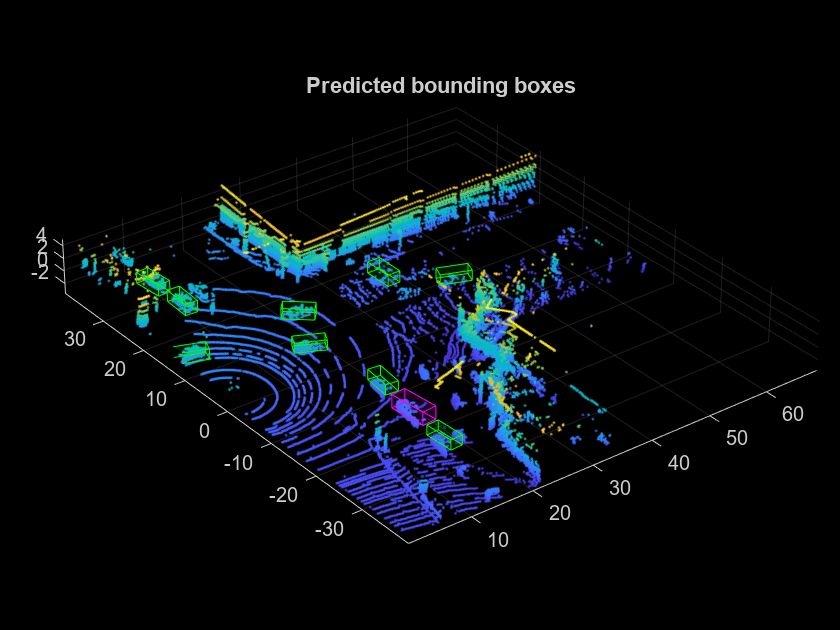
Display the detections on the point cloud.
helperDisplay3DBoxesOverlaidPointCloud(pc.Location,bboxesCar,'green',... bboxesTruck,'magenta','Predicted bounding boxes');
Generate CUDA MEX
To generate CUDA® code for the pointpillarsDetect entry-point function, create a GPU code configuration object for a MEX target and set the target language to C++. Use the coder.DeepLearningConfig (GPU Coder) function to create a cuDNN deep learning configuration object and assign it to the DeepLearningConfig property of the GPU code configuration object.
cfg = coder.gpuConfig('mex'); cfg.TargetLang = 'C++'; cfg.DeepLearningConfig = coder.DeepLearningConfig(TargetLibrary='cudnn'); dataLoc = pc.Location; dataInt = pc.Intensity; args = {coder.Constant(matFile) coder.typeof(dataLoc,[Inf,3],[1 0]) coder.typeof(dataInt,[Inf,1],[1 0]) coder.typeof(confidenceThreshold)}; codegen -config cfg pointpillarsDetect -args args -report
Code generation successful: View report
Run the Generated MEX
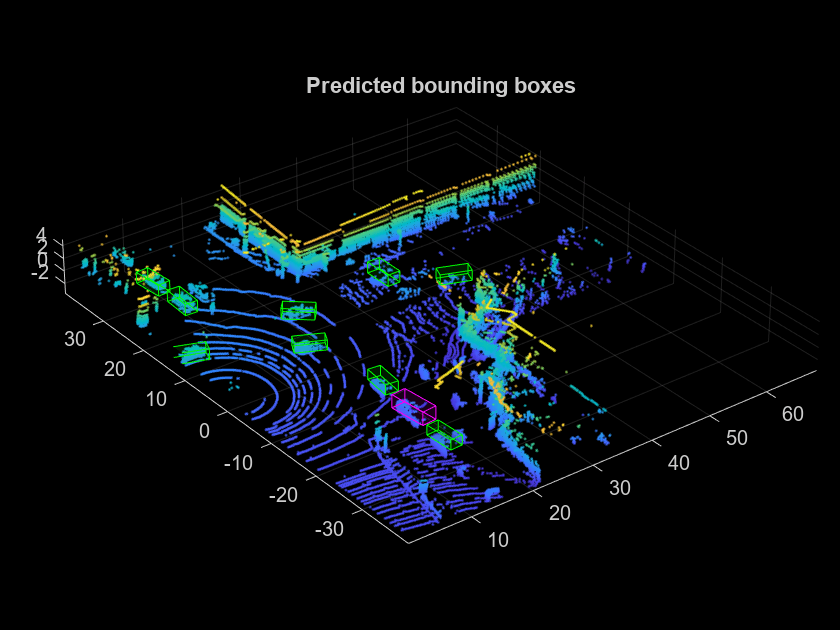
Call the generated CUDA MEX with the point cloud. Display the results.
[bboxes,~,labels] = pointpillarsDetect_mex(matFile,dataLoc,dataInt,confidenceThreshold); bboxesCar = bboxes(labels == 'Car',:); bboxesTruck = bboxes(labels == 'Truck',:); helperDisplay3DBoxesOverlaidPointCloud(pc.Location,bboxesCar,'green',... bboxesTruck,'magenta','Predicted bounding boxes');
Helper Functions
function helperDisplay3DBoxesOverlaidPointCloud(ptCld,labelsCar,carColor,... labelsTruck,truckColor,titleForFigure) % Display the point cloud with different colored bounding boxes for different % classes figure; ax = pcshow(ptCld); showShape('cuboid',labelsCar,'Parent',ax,'Opacity',0.1,'Color',... carColor,'LineWidth',0.5); hold on; showShape('cuboid',labelsTruck,'Parent',ax,'Opacity',0.1,'Color',... truckColor,'LineWidth',0.5); title(titleForFigure); zoom(ax,1.5); end
References
[1] Lang, Alex H., Sourabh Vora, Holger Caesar, Lubing Zhou, Jiong Yang, and Oscar Beijbom. "PointPillars: Fast Encoders for Object Detection From Point Clouds." In 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 12689-12697. Long Beach, CA, USA: IEEE, 2019. https://doi.org/10.1109/CVPR.2019.01298.
[2] Hesai and Scale. PandaSet. Accessed September 18, 2025. https://pandaset.org/. The PandaSet data set is provided under the CC-BY-4.0 license.
[3] Xiao, Pengchuan, Zhenlei Shao, Steven Hao, et al. “PandaSet: Advanced Sensor Suite Dataset for Autonomous Driving.” 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), IEEE, September 19, 2021, 3095–101. https://doi.org/10.1109/ITSC48978.2021.9565009.