Motor Carrier
使用 MKR Motor Carrie 或 Nano Motor Carrier 上的两个编码器输入,在闭环控制中控制伺服电机以及 DC 电机 M1 和 M2。在使用 motor carrier 函数之前,请创建 arduino 对象。有关详细信息,请参阅Connect to Arduino Hardware。
函数
主题
- Using Arduino Engineering Kit Rev 2 with Pre-Configured Projects in Support Package
Learn how to use Arduino® Engineering Kit Rev 2 with the support package.
精选示例

Webcam Controlled Rover Using Arduino Engineering Kit Rev 2
Use Arduino® Engineering Kit Rev 2 to program a differential drive robot that can be remotely controlled by MATLAB® over Wi-Fi® to perform operations such as path following and moving objects with a forklift along with obstacle avoidance.

Drawing Robot Using Arduino Engineering Kit Rev 2
Use Arduino® Engineering Kit Rev 2 to build and program a robot that extracts line traces from an image and reproduces it as a drawing on a whiteboard. The project uses MATLAB® code to capture an image using a webcam, and then convert it into a set of motor commands using image processing techniques, which drive the robot across a whiteboard and reproduce the captured image as a drawing.
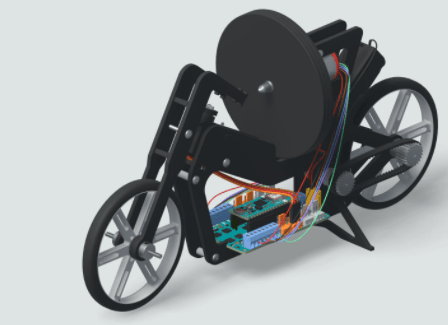
Self-Balancing Motorcycle Using Arduino Engineering Kit Rev 2
Use Arduino® Engineering Kit Rev 2 to build and program a motorcycle bot that self-balances and maneuvers by itself using a flywheel. The project models the motorcycle with the help of inverted pendulum dynamics and performs inertial sensing to balance the motorcycle by controlling the flywheel, located at the center of the motorcycle.