union
polyshape 对象的并集
语法
说明
___ = union(___, 支持上述语法中的任何输入参量组合,且可使用一个或多个名称-值参量指定选项。您可以使用上述语法中的任何输出参量组合。例如,Name=Value)polyout = union(poly1,poly2,Simplify=false) 返回一个 polyshape 对象,该对象的顶点未经修改,不管是有交集还是有不正确的嵌套。
示例
创建并绘制两个多边形。
poly1 = polyshape([0 0 1 1],[1 0 0 1]);
poly2 = polyshape([0.75 1.25 1.25 0.75],[0.25 0.25 0.75 0.75]);
plot(poly1)
hold on
plot(poly2)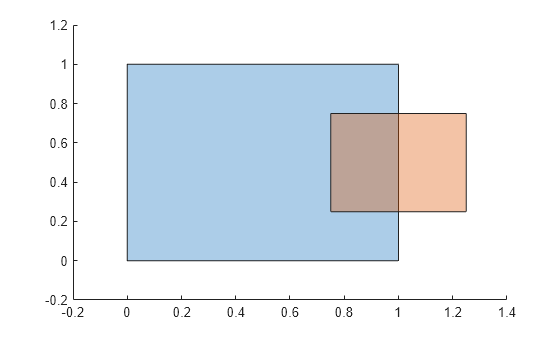
figure
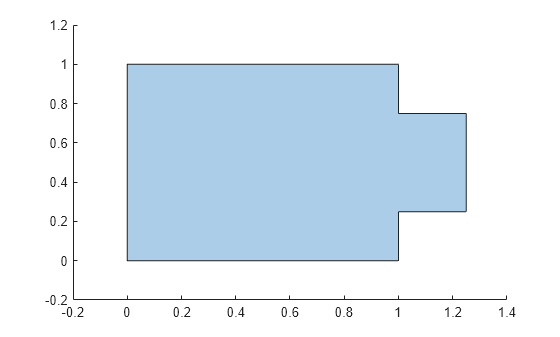
计算并绘制 poly1 和 poly2 的并集。
polyout = union(poly1,poly2)
polyout =
polyshape with properties:
Vertices: [8×2 double]
NumRegions: 1
NumHoles: 0
plot(polyout) xlim([-0.2 1.4]); ylim([-0.2 1.2]);
创建一个多边形向量并绘制每个多边形。
polyarray1 = polyshape([0 0 1 1],[1 0 0 1]); polyarray2 = polyshape([0.75 1.25 1.25 0.75],[0.25 0.25 0.75 0.75]); polyvec = [polyarray1 polyarray2]
polyvec =
1×2 polyshape array with properties:
Vertices
NumRegions
NumHoles
plot(polyvec(1))
hold on
plot(polyvec(2))
figure
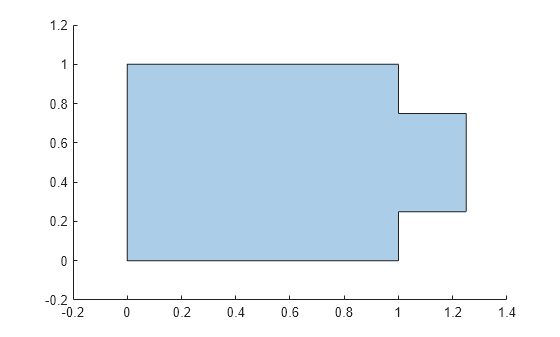
计算并绘制两个多边形的并集。
polyout = union(polyvec)
polyout =
polyshape with properties:
Vertices: [8×2 double]
NumRegions: 1
NumHoles: 0
plot(polyout) xlim([-0.2 1.4]); ylim([-0.2 1.2]);
创建两个多边形,计算并绘制其并集。显示并集的顶点坐标和相应的顶点映射信息。
poly1 = polyshape([0 0 1 1],[1 0 0 1]);
poly2 = translate(poly1,[0.5 0]);
[polyout,shapeID,vertexID] = union(poly1,poly2);
plot(polyout)
axis equal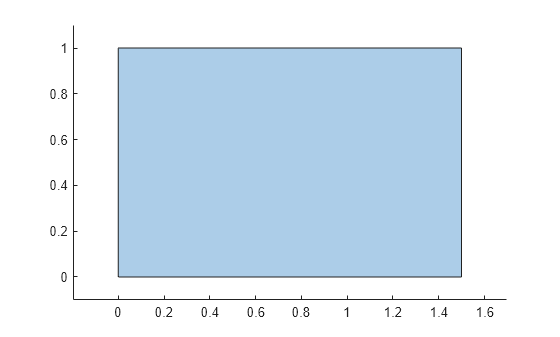
[polyout.Vertices shapeID vertexID]
ans = 4×4
0 1.0000 1.0000 1.0000
1.5000 1.0000 2.0000 2.0000
1.5000 0 2.0000 3.0000
0 0 1.0000 4.0000
并集的第一个和最后一个顶点源于 poly1,因为 shapeID 中的对应值为 1。这些顶点分别是属性 poly1.Vertices 中的第一个和第四个顶点,因为 vertexID 中的对应值分别为 1 和 4。同样,并集的第二个和第三个顶点源于 poly2,它们分别是属性 poly2.Vertices 中的第二个和第三个顶点。