Ld Estimator
库:
Motor Control Blockset /
Parameter Estimation /
PMSM Parameter Estimation
描述
Ld Estimator 模块使用相电流、定子电阻和测试配置元素计算 PMSM 的 d 轴定子电感。
首先,该模块通过注入恒定电压 (Vd) 沿 d 轴锁定转子。这可确保转子在频率注入过程中保持静止(与 d 轴对齐)。为了估计 d 轴定子电感,该模块沿 d 轴注入高频电压信号,然后通过使用频率扫描步长(Hz) 参数定义的步长逐渐降低注入的信号频率来执行频率扫描过程。在频率扫描期间,该模块监控电机相电流的幅值。当注入的信号频率达到最小值(最低频率(Hz) 参数)时,该模块通过注入具有上升频率的信号来开始估计过程,该上升频率的步长为估计时所用频率步长(Hz),步数由估计时所用频率数参数定义。有关这些参数的详细信息,请参阅 PMSM Parameter Estimation Configurator。
下图显示频率扫描和上升频率的增量步长。
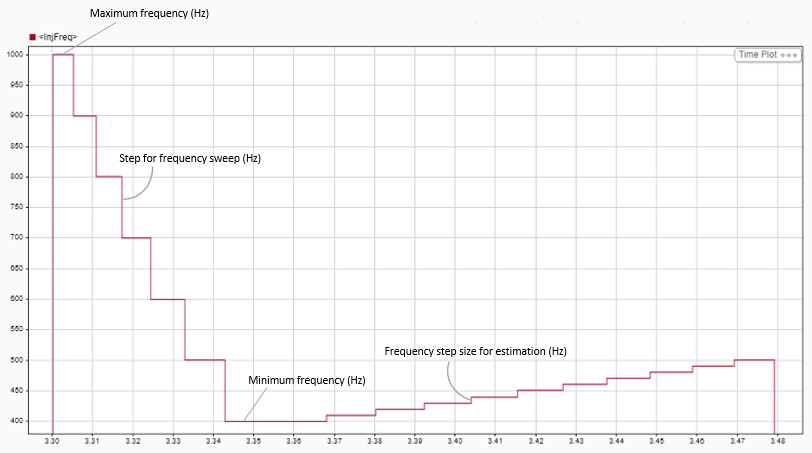
Ld 估计过程使用测得的频率扫描持续时间以及变化频率的步长来估计 d 轴定子电感 Ld。
示例
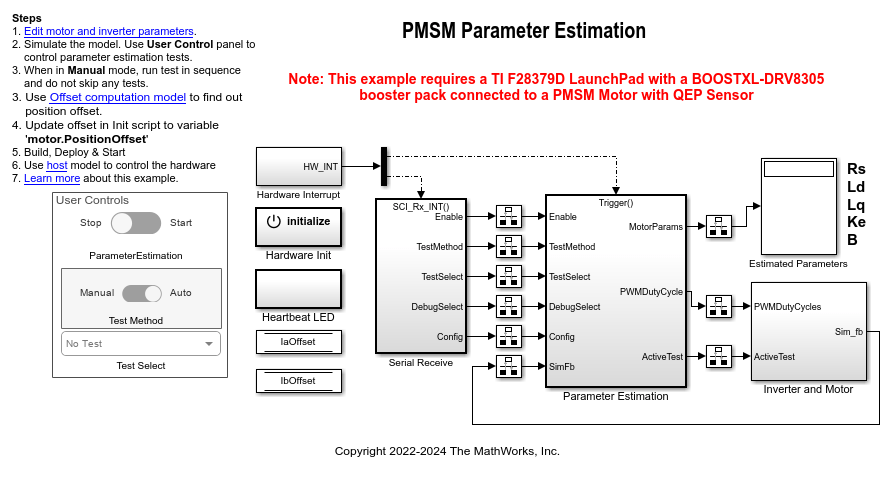
使用参数估计模块估计 PMSM 参数
此示例使用 Motor Control Blockset™ 提供的参数估计模块来估计具有正交编码器的永磁同步电机 (PMSM) 的以下参数:
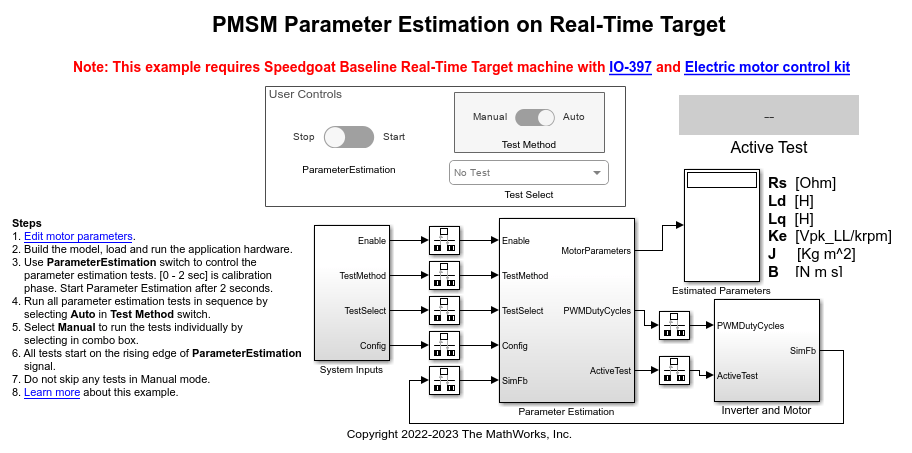
Estimate PMSM Parameters Using Parameter Estimation Blocks on Real-Time Systems
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of a permanent magnet synchronous motor (PMSM):