PMSM Parameter Estimation Configurator
库:
Motor Control Blockset /
Parameter Estimation /
PMSM Parameter Estimation
描述
PMSM Parameter Estimation Configurator 模块生成以下配置元素,用于估计永磁同步电机 (PMSM) 的参数:
电机和逆变器硬件元素
用于估计电机电阻 (Rs) 的元素
用于估计电机电感(Ld 和 Lq)的元素
用于估计反电动势常量 (Ke)、电机惯量 (J) 和摩擦常量 (B) 的元素
该模块使用参数设置来生成包含配置元素的输出总线。您可以在以下 PMSM 参数估计模块中使用配置元素:
示例
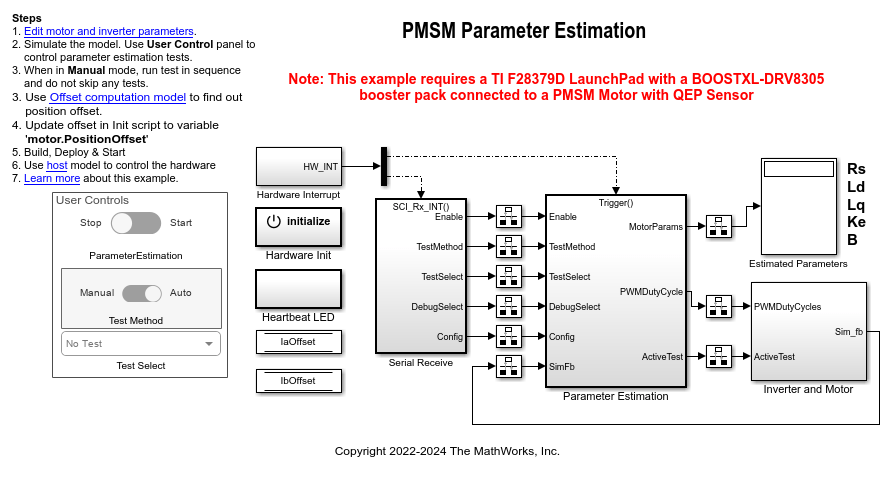
使用参数估计模块估计 PMSM 参数
此示例使用 Motor Control Blockset™ 提供的参数估计模块来估计具有正交编码器的永磁同步电机 (PMSM) 的以下参数:
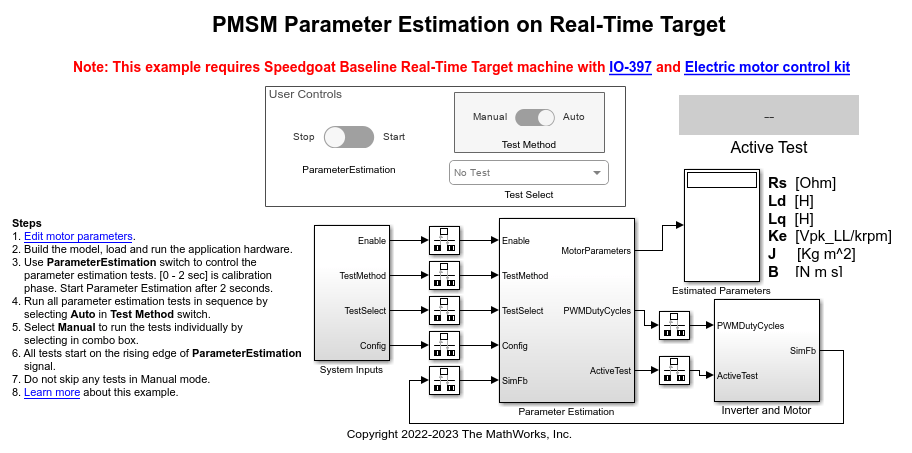
Estimate PMSM Parameters Using Parameter Estimation Blocks on Real-Time Systems
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of a permanent magnet synchronous motor (PMSM):
端口
输出
参数
扩展功能
版本历史记录
在 R2023a 中推出