mcb.generateMotorLUT
Description
outSt = mcb.generateMotorLUT(motor,inverter,purpose)motor.
Use the purpose argument to specify the type of lookup table.
"Star2Star"or"Star2Delta"— Generate lookup tables that you can use for FEM parameterized plant models for a permanent magnet synchronous motor (PMSM)."idiqLUTs"or related options — Generate 2D reference current lookup tables i(T,w) or i(w,T) as a function of torque T and motor speed w."idiq3dLUTs"or related options — Generate 3D reference current lookup tables i(w,T,v) or i(T,w,v) as a function of torque T, motor speed w, and DC voltage v.
For reference current lookup tables, input nonlinear lookup table parameters using the
optional PMSMLUT field of the motor argument.
Specify the lookup table generation method using the PMSMLUT.method field:
"lumped"— Use linear model with lumped parameters for Ld, Lq, andFluxPM."Ldq"— Use nonlinear model with Ld, Lq, andFluxPMLUTs."FluxDQ"— Use nonlinear model with d-axis and q-axis flux linkage LUTs.
If you do not specify the PMSMLUT or
PMSMLUT.method field, the function assumes linear lumped
parameters.
Use the generated lookup tables to characterize the linear or non-linear behavior of your motor. For instance, use reference current lookup tables as inputs to an LUT based PMSM Control Reference, LUT based ACIM Control Reference, or LUT based SynRM Control Reference block. For an example involving a PMSM, see Determine Nonlinear Behavior of PMSM Using Characterization Test Data.
Examples
Get parameters for your motor and inverter. This example uses a BLY171D PMSM and DRV8312-C2-KIT inverter.
pmsm = mcb.getPMSMParameters("BLY171D"); inverter = mcb.getInverterParameters("DRV8312-C2-KIT");
Generate lookup tables for a star-to-delta FEM PMSM plant model.
mcb.generateMotorLUT(pmsm,inverter,"Star2Delta")ans =
struct with fields:
idVec: [-1.8000 -0.9000 0 0.9000 1.8000]
iqVec: [-1.8000 -0.9000 0 0.9000 1.8000]
degVec: [0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30]
windingType: 'star'
fluxD: [5×5×16 double]
fluxQ: [5×5×16 double]
Torq: [5×5×16 double]
Rs: 0.7500Get lumped parameters for your motor and inverter. This example uses a BLY171D PMSM and DRV8312-C2-KIT inverter.
pmsm = mcb.getPMSMParameters("BLY171D"); inverter = mcb.getInverterParameters("DRV8312-C2-KIT");
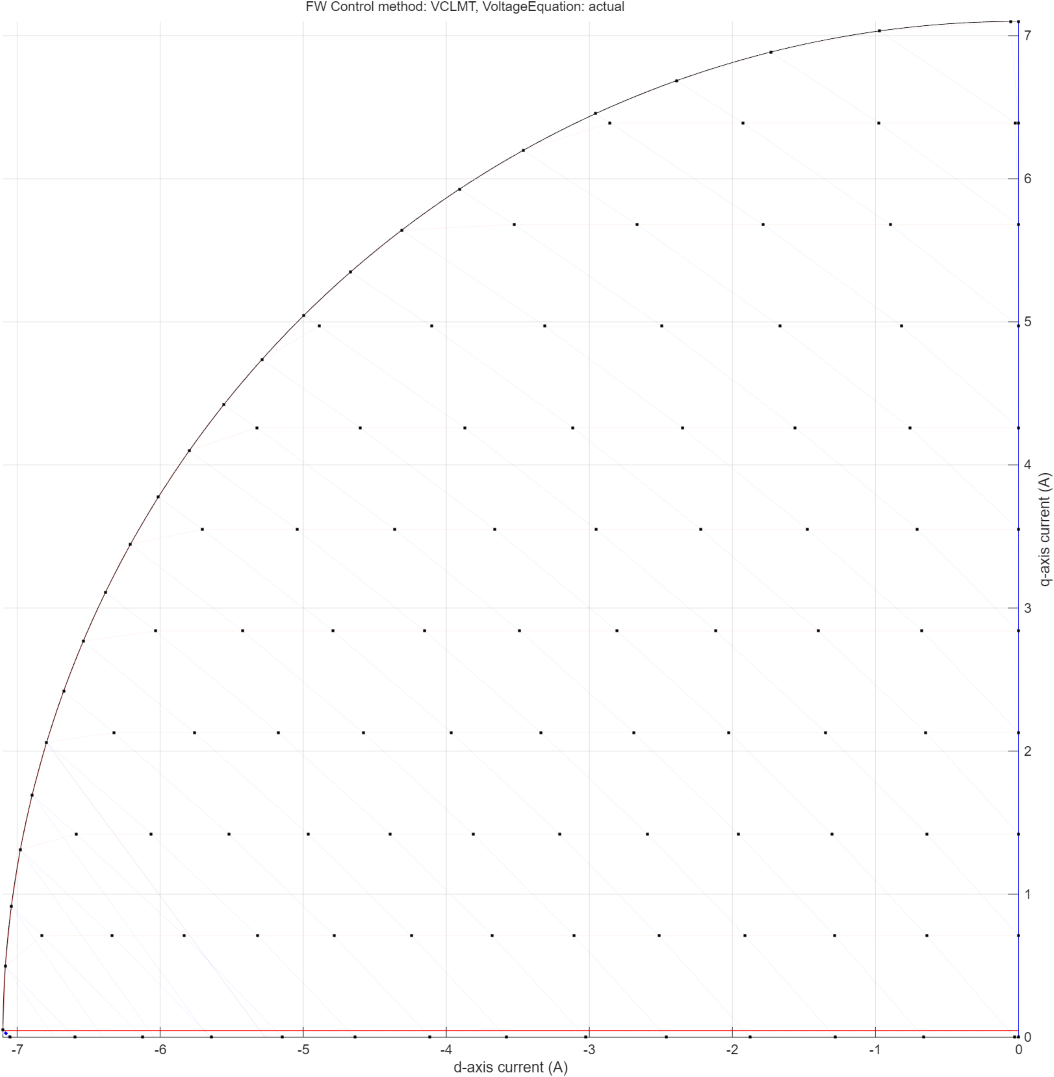
Generate 2D reference current lookup tables, and draw their values in current space.
mcb.generateMotorLUT(pmsm,inverter,"idiqLUTs",drawLUT=1)ans =
struct with fields:
drawLUTonConstraintCurves: 0
FWCMethod: 'vclmt'
motorType: 'spmsm'
wrpmVec: [1 150 299 447 596 745 894 1042 1191 1340 1489 1637 1786 1935 2084 2232 2381 2530 2679 2827 2976 3125 3274 3423 3571 … ] (1×64 double)
trefVec: [-0.0566 -0.0509 -0.0453 -0.0396 -0.0339 -0.0283 -0.0226 -0.0170 -0.0113 -0.0057 0 0.0057 0.0113 0.0170 0.0226 … ] (1×21 double)
idTable: [21×64 double]
iqTable: [21×64 double]
idqformat: 'Tw'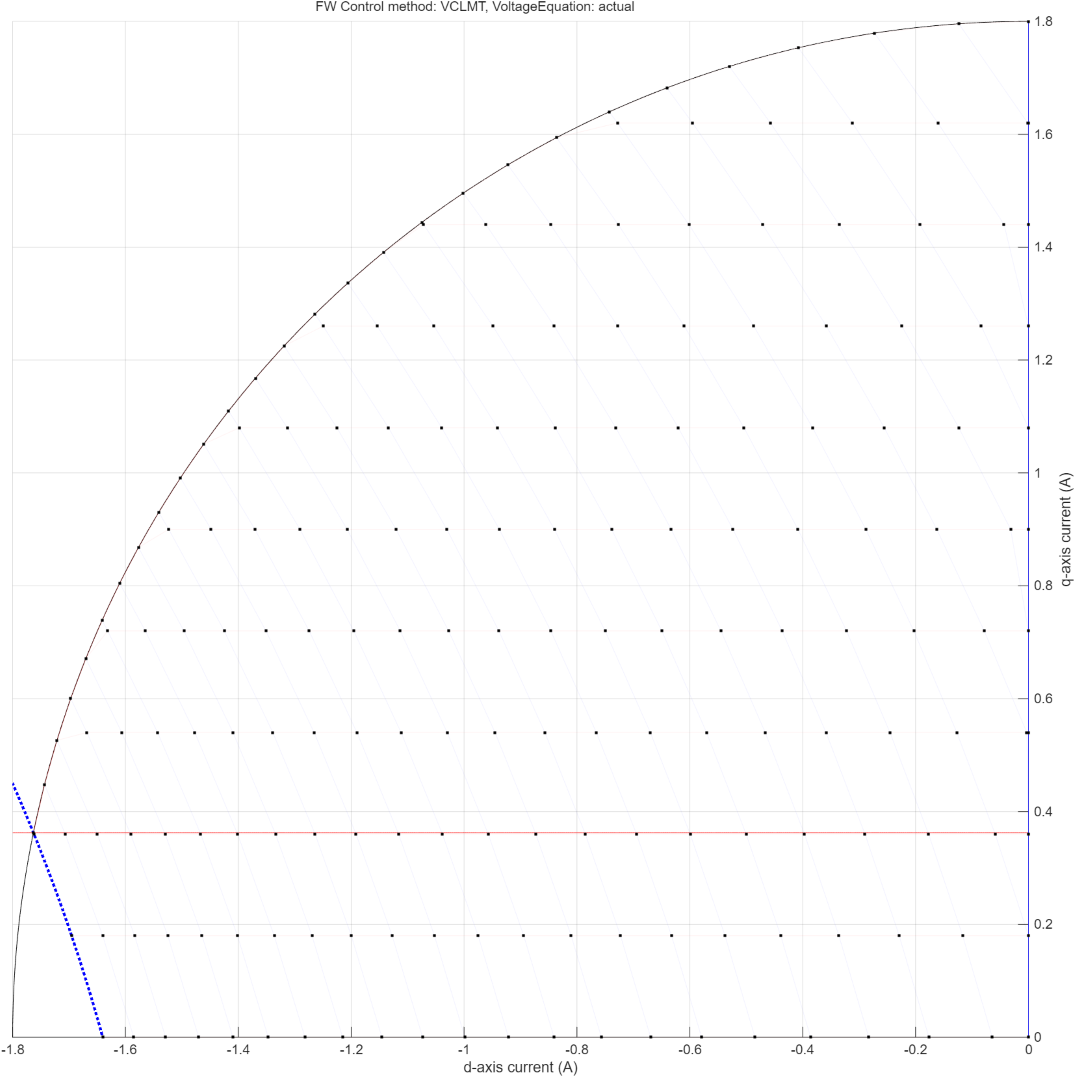
Get lumped parameters for your motor and inverter. This example uses a Teknic2310P PMSM and BoostXL-DRV8305 inverter.
pmsm = mcb.getPMSMParameters("Teknic2310P"); inverter = mcb.getInverterParameters("BoostXL-DRV8305");
Populate the pmsm.PMSMLUT structure with inductance flux data
from a nonlinear model.
pmsm.PMSMLUT.method = "Ldq";
pmsm.PMSMLUT.idVec = [-4,-2,0,2] * pmsm.I_rated;
pmsm.PMSMLUT.iqVec = [-4,-2,0,2,4] * pmsm.I_rated;
pmsm.PMSMLUT.LdTable = pmsm.Ld * ones(4,5);
pmsm.PMSMLUT.LqTable = pmsm.Lq * ones(4,5);
pmsm.PMSMLUT.FluxPMTable = pmsm.FluxPM * ones(4,5);Generate 2D reference current lookup tables, then draw their values in current space.
mcb.generateMotorLUT(pmsm,inverter,"idiqLUTs",drawLUT=1)ans =
struct with fields:
method: 'Ldq'
idVec: [-28.4000 -14.2000 0 14.2000]
iqVec: [-28.4000 -14.2000 0 14.2000 28.4000]
LdTable: [4×5 double]
LqTable: [4×5 double]
FluxPMTable: [4×5 double]
FWCMethod: 'vclmt'
motorType: 'spmsm'
wrpmVec: [1 105 208 312 415 519 622 726 829 933 1036 1140 1243 1347 1450 1554 1657 1761 1865 1968 2072 2175 2279 2382 2486 2589 2693 2796 2900 … ] (1×64 double)
trefVec: [-0.2724 -0.2452 -0.2180 -0.1907 -0.1635 -0.1362 -0.1090 -0.0817 -0.0545 -0.0272 0 0.0272 0.0545 0.0817 0.1090 0.1362 0.1635 0.1907 … ] (1×21 double)
idTable: [21×64 double]
iqTable: [21×64 double]
idqformat: 'Tw'