ahrs10filter
Height and orientation from MARG and altimeter readings
Description
The ahrs10filter object fuses MARG and altimeter sensor data to
estimate device height and orientation. MARG (magnetic, angular rate, gravity) data is
typically derived from magnetometer, gyroscope, and accelerometer sensors. The filter uses an
18-element state vector to track the orientation quaternion, vertical velocity, vertical
position, MARG sensor biases, and geomagnetic vector. The ahrs10filter object
uses an extended Kalman filter to estimate these quantities.
Creation
Syntax
Description
FUSE = ahrs10filterFUSE, for sensor fusion of MARG and altimeter
readings to estimate device height and orientation.
FUSE = ahrs10filter('ReferenceFrame',RF)RF.
FUSE = ahrs10filter(___,Name=Value)
Input Arguments
Properties
Object Functions
predict | Update states using accelerometer and gyroscope data for
ahrs10filter |
fusemag | Correct states using magnetometer data for
ahrs10filter |
fusealtimeter | Correct states using altimeter data for
ahrs10filter |
correct | Correct states using direct state measurements for
ahrs10filter |
residual | Residuals and residual covariances from direct state measurements for
ahrs10filter |
residualmag | Residuals and residual covariance from magnetometer measurements for
ahrs10filter |
residualaltimeter | Residuals and residual covariance from altimeter measurements for
ahrs10filter |
pose | Current orientation and position estimate for
ahrs10filter |
reset | Reset internal states for ahrs10filter |
stateinfo | Display state vector information for ahrs10filter |
tune | Tune ahrs10filter parameters to reduce estimation
error |
copy | Create copy of ahrs10filter |
Examples
Load logged sensor data, ground truth pose, and initial state and initial state covariance. Calculate the number of IMU samples per altimeter sample and the number of IMU samples per magnetometer sample.
load('fuse10exampledata.mat', ... 'imuFs','accelData','gyroData', ... 'magnetometerFs','magData', ... 'altimeterFs','altData', ... 'expectedHeight','expectedOrient', ... 'initstate','initcov'); imuSamplesPerAlt = fix(imuFs/altimeterFs); imuSamplesPerMag = fix(imuFs/magnetometerFs);
Create an AHRS filter that fuses MARG and altimeter readings to estimate height and orientation. Set the sampling rate and measurement noises of the sensors. The values were determined from datasheets and experimentation.
filt = ahrs10filter('IMUSampleRate',imuFs, ... 'AccelerometerNoise',0.1, ... 'State',initstate, ... 'StateCovariance',initcov); Ralt = 0.24; Rmag = 0.9;
Preallocate variables to log height and orientation.
numIMUSamples = size(accelData,1);
estHeight = zeros(numIMUSamples,1);
estOrient = zeros(numIMUSamples,1,'quaternion');Fuse accelerometer, gyroscope, magnetometer and altimeter data. The outer loop predicts the filter forward at the fastest sample rate (the IMU sample rate).
for ii = 1:numIMUSamples % Use predict to estimate the filter state based on the accelometer and % gyroscope data. predict(filt,accelData(ii,:),gyroData(ii,:)); % Magnetometer data is collected at a lower rate than IMU data. Fuse % magnetometer data at the lower rate. if ~mod(ii,imuSamplesPerMag) fusemag(filt,magData(ii,:),Rmag); end % Altimeter data is collected at a lower rate than IMU data. Fuse % altimeter data at the lower rate. if ~mod(ii, imuSamplesPerAlt) fusealtimeter(filt,altData(ii),Ralt); end % Log the current height and orientation estimate. [estHeight(ii),estOrient(ii)] = pose(filt); end
Calculate the RMS errors between the known true height and orientation and the output from the AHRS filter.
pErr = expectedHeight - estHeight;
qErr = rad2deg(dist(expectedOrient,estOrient));
pRMS = sqrt(mean(pErr.^2));
qRMS = sqrt(mean(qErr.^2));
fprintf('Altitude RMS Error\n');Altitude RMS Error
fprintf('\t%.2f (meters)\n\n',pRMS);0.38 (meters)
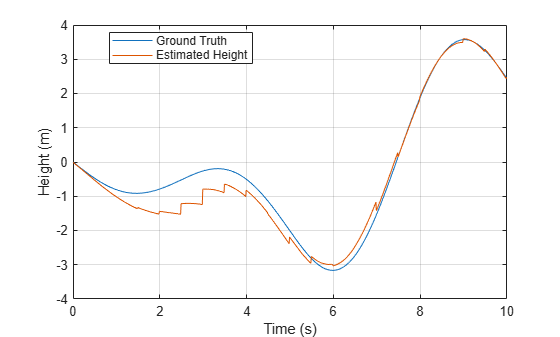
Visualize the true and estimated height over time.
t = (0:(numIMUSamples-1))/imuFs; plot(t,expectedHeight);hold on plot(t,estHeight);hold off legend('Ground Truth','Estimated Height','location','best') ylabel('Height (m)') xlabel('Time (s)') grid on
fprintf('Quaternion Distance RMS Error\n');Quaternion Distance RMS Error
fprintf('\t%.2f (degrees)\n\n',qRMS);2.93 (degrees)
Extended Capabilities
Version History
Introduced in R2019a