derivative
Description
stateDot = derivative(kinematicModel,state,cmds)stateDot, as a three-element
vector [xDot yDot thetaDot] for a bicycle kinematics vehicle motion
model, kinematicModel. xDot and
yDot refer to the vehicle velocity, specified in meters per second.
thetaDot is the angular velocity of the vehicle heading, specified in
radians per second.
Examples
Create a robot and set its initial starting position and orientation.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
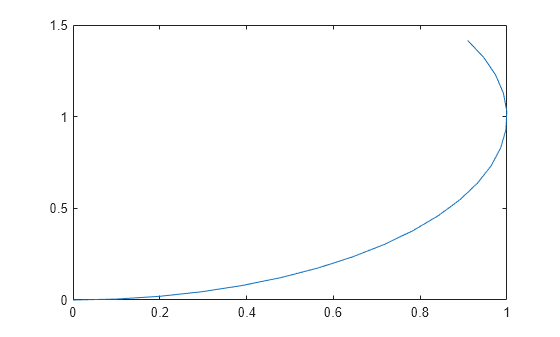
Set the timespan of the simulation to 1 s with 0.05 s time steps and the input commands to 2 m/s for the vehicle speed and pi/4 rad for the steering angle to create a left turn. Simulate the motion of the robot by using the ode45 solver on the derivative function.
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Plot the path.
figure plot(y(:,1),y(:,2))
Input Arguments
Output Arguments
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. 1st ed. Cambridge, MA: Cambridge University Press, 2017.
Extended Capabilities
Version History
Introduced in R2021b