ode45
求解非刚性微分方程 - 中阶方法
语法
说明
[(其中 t,y] = ode45(odefun,tspan,y0)tspan = [t0 tf])求微分方程组 从 t0 到 tf 的积分,初始条件为 y0。解数组 y 中的每一行都与列向量 t 中返回的值相对应。
所有 MATLAB® ODE 求解器都可以解算 形式的方程组,或涉及质量矩阵 的问题。求解器都使用类似的语法。ode23s 求解器只能解算质量矩阵为常量的问题。ode15s 和 ode23t 可以解算具有奇异质量矩阵的问题,称为微分代数方程 (DAE)。使用 odeset 的 Mass 选项指定质量矩阵。
ode45 是一个通用型 ODE 求解器,是您解算大多数问题时的首选。但是,对于刚性问题或需要较高准确性的问题,其他 ODE 求解器可能更适合。有关详细信息,请参阅选择 ODE 求解器。
示例
在对求解器的调用中,可将只有一个解分量的简单 ODE 指定为匿名函数。该匿名函数必须同时接受两个输入 (t,y),即使在该函数中一个输入未使用也是如此。
解算 ODE
指定时间区间 [0 5] 和初始条件 y0 = 0。
tspan = [0 5]; y0 = 0; [t,y] = ode45(@(t,y) 2*t, tspan, y0);
对解绘图。
plot(t,y,'-o')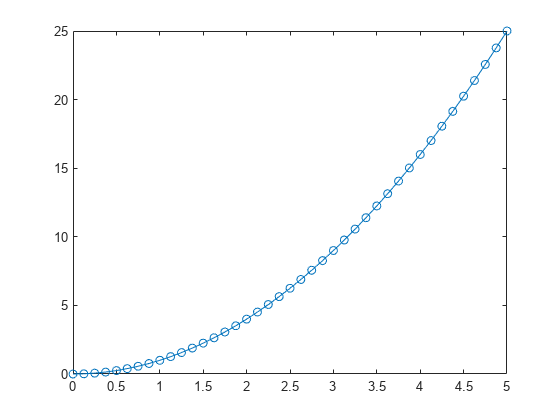
范德波尔方程为二阶 ODE
其中 为标量参数。通过执行 代换,将此方程重写为一阶 ODE 方程组。生成的一阶 ODE 方程组为
函数文件 vdp1.m 代表使用 的范德波尔方程。变量 和 是二元素向量 dydt 的项 y(1) 和 y(2)。
function dydt = vdp1(t,y) %VDP1 Evaluate the van der Pol ODEs for mu = 1 % % See also ODE113, ODE23, ODE45. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2014 The MathWorks, Inc. dydt = [y(2); (1-y(1)^2)*y(2)-y(1)];
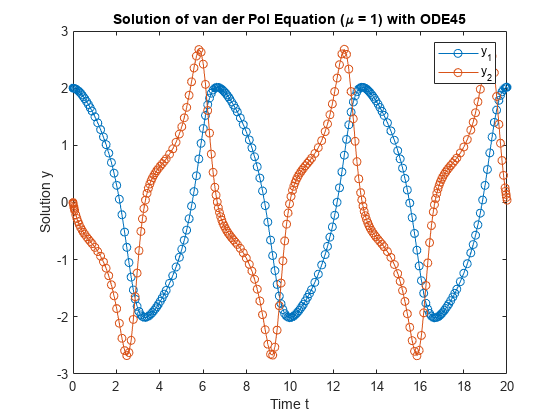
使用 ode45 函数、时间区间 [0 20] 和初始值 [2 0] 来解算该 ODE。生成的输出即为时间点 t 的列向量和解数组 y。y 中的每一行都与 t 的相应行中返回的时间相对应。y 的第一列与 相对应,第二列与 相对应。
[t,y] = ode45(@vdp1,[0 20],[2; 0]);
绘制 和 的解对 t 的图。
plot(t,y(:,1),'-o',t,y(:,2),'-o') title('Solution of van der Pol Equation (\mu = 1) with ODE45'); xlabel('Time t'); ylabel('Solution y'); legend('y_1','y_2')
ode45 仅适用于使用两个输入参量(t 和 y)的函数。但是,通过在函数外部定义参数并在指定函数句柄时传递这些参数,可以传入额外参数。
解算 ODE
将该方程重写为一阶方程组可以得到
此示例末尾包含的局部函数 odefcn 将此方程组表示为接受四个输入参量(t、y、A 和 B)的函数。
function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
使用 ode45 解算 ODE。指定函数句柄,使其将 A 和 B 的预定义值传递给 odefcn。
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode45(@(t,y) odefcn(t,y,A,B), tspan, y0);
绘制结果。
plot(t,y(:,1),'-o',t,y(:,2),'-.')

function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
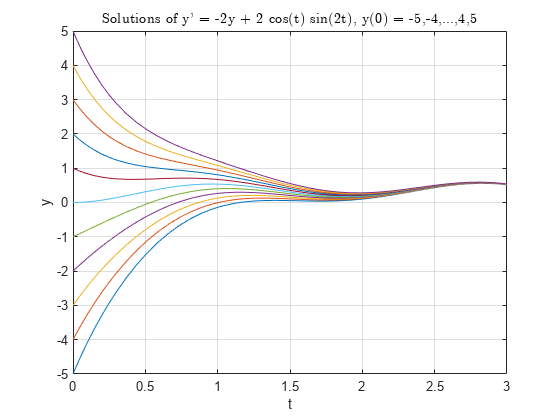
对于只有一个方程的简单 ODE 方程组,可以将 y0 指定为一个包含多个初始条件的向量。此方法通过标量扩展创建一个由独立方程组成的方程组,每个初始值对应一个方程,ode45 求解该方程组以针对每个初始值生成结果。
创建一个匿名函数来表示方程 。该函数必须接受分别对应于 t 和 y 的两个输入。
yprime = @(t,y) -2*y + 2*cos(t).*sin(2*t);
创建一个由范围 内的不同初始条件组成的向量。
y0 = -5:5;
使用 ode45 计算方程在时间区间 内针对每个初始条件的解。
tspan = [0 3]; [t,y] = ode45(yprime,tspan,y0);
绘制结果。
plot(t,y) grid on xlabel('t') ylabel('y') title('Solutions of y'' = -2y + 2 cos(t) sin(2t), y(0) = -5,-4,...,4,5','interpreter','latex')
此方法对于求解具有多个初始条件的简单 ODE 非常有用。然而,该方法也有一些折衷:
您无法求解具有多个初始条件的方程组。该方法仅适用于求解一个具有多个初始条件的方程。
求解器在每步选择的时间步基于方程组中需要采取最小步长的方程。这意味着求解器可以采取小步长来满足一个初始条件的方程,但其他方程如果单独求解的话将使用不同步长。尽管如此,同时针对多个初始条件进行求解通常比使用
for循环分别求解方程更快。
有关此方法的详细信息,请参阅求解具有多个初始条件的 ODE 方程组。
请考虑以下带有时间相关参数的 ODE:

初始条件为  。函数
。函数 f(t) 由在时间 ft 时计算的 n×1 向量 f 定义。函数 g(t) 由在时间 gt 时计算的 m×1 向量 g 定义。
创建向量 f 和 g。
ft = linspace(0,5,25); f = ft.^2 - ft - 3; gt = linspace(1,6,25); g = 3*sin(gt-0.25);
编写名为 myode 的函数,该函数通过对 f 和 g 进行插值获取时间相关项在指定时间的值。将函数保存到您当前的文件夹中,以运行示例的其余部分。
myode 函数接受额外的输入参量以计算每个时间步的 ODE,但 ode45 只使用前两个输入参量 t 和 y。
function dydt = myode(t,y,ft,f,gt,g) f = interp1(ft,f,t); % Interpolate the data set (ft,f) at time t g = interp1(gt,g,t); % Interpolate the data set (gt,g) at time t dydt = -f.*y + g; % Evaluate ODE at time t
使用 ode45 计算方程在时间区间 [1 5] 内的解。使用函数句柄指定函数,从而使 ode45 只使用 myode 的前两个输入参量。此外,使用 odeset 放宽误差阈值。
tspan = [1 5]; ic = 1; opts = odeset('RelTol',1e-2,'AbsTol',1e-4); [t,y] = ode45(@(t,y) myode(t,y,ft,f,gt,g), tspan, ic, opts);
绘制解 y 随时间点 t 变化的图。
plot(t,y)

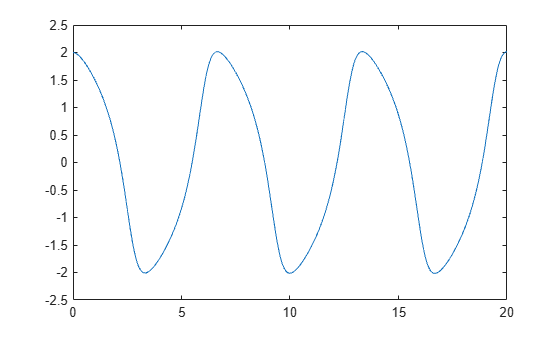
范德波尔方程为二阶 ODE
使用 ode45 以及 解算范德波尔方程。函数 vdp1.m 随 MATLAB® 一起提供,用于对方程进行编码。指定单个输出以返回包含解信息(如求解器和计算点)的结构体。
tspan = [0 20]; y0 = [2 0]; sol = ode45(@vdp1,tspan,y0)
sol = struct with fields:
solver: 'ode45'
extdata: [1×1 struct]
x: [0 1.0048e-04 6.0285e-04 0.0031 0.0157 0.0785 0.2844 0.5407 0.8788 1.4032 1.8905 2.3778 2.7795 3.1285 3.4093 3.6657 3.9275 4.2944 4.9013 5.3506 5.7998 6.2075 6.5387 6.7519 6.9652 7.2247 7.5719 8.1226 8.6122 9.1017 9.5054 … ] (1×60 double)
y: [2×60 double]
stats: [1×1 struct]
idata: [1×1 struct]
使用 linspace 在区间 [0 20] 内生成 250 个点。使用 deval 计算在这些点上的解。
x = linspace(0,20,250); y = deval(sol,x);
绘制解的第一个分量。
plot(x,y(1,:))
使用 odextend 将解扩展到 ,并将结果添加到原始图中。
sol_new = odextend(sol,@vdp1,35); x = linspace(20,35,350); y = deval(sol_new,x); hold on plot(x,y(1,:),'r')

输入参数
输出参量
参考
[1] Dormand, J. R. and P. J. Prince, “A family of embedded Runge-Kutta formulae,” J. Comp. Appl. Math., Vol. 6, 1980, pp. 19–26.
[2] Shampine, L. F. and M. W. Reichelt, “The MATLAB ODE Suite,” SIAM Journal on Scientific Computing, Vol. 18, 1997, pp. 1–22.
扩展功能
版本历史记录
在 R2006a 之前推出