ode78
语法
说明
sol = ode78(___)deval 结合使用来计算区间 [t0 tf] 中任意点位置的解。您可以使用上述语法中的任何输入参量组合。
示例
在对求解器的调用中,可将只有一个解分量的简单 ODE 指定为匿名函数。该匿名函数必须同时接受两个输入 (t,y),即使在该函数中一个输入未使用也是如此。
解算 ODE
指定时间区间 [0 5] 和初始条件 y0 = 0。
tspan = [0 5]; y0 = 0; [t,y] = ode78(@(t,y) 2*t, tspan, y0);
对解绘图。
plot(t,y,'-o')
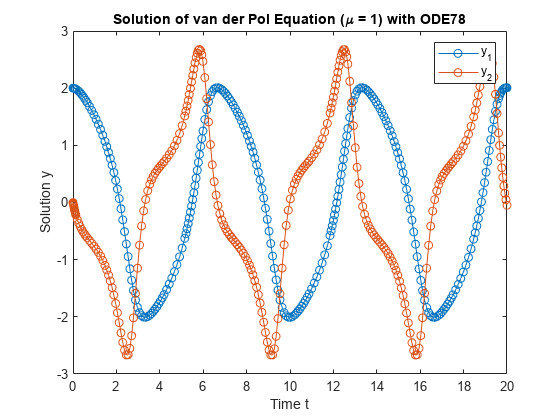
范德波尔方程为二阶 ODE
其中 为标量参数。通过执行 代换,将此方程重写为一阶 ODE 方程组。生成的一阶 ODE 方程组为
函数文件 vdp1.m 代表使用 的范德波尔方程。变量 和 是二元素向量 dydt 的项 y(1) 和 y(2)。
function dydt = vdp1(t,y) %VDP1 Evaluate the van der Pol ODEs for mu = 1 % % See also ODE113, ODE23, ODE45. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2014 The MathWorks, Inc. dydt = [y(2); (1-y(1)^2)*y(2)-y(1)];
使用 ode78 函数、时间区间 [0 20] 和初始值 [2 0] 来解算该 ODE。生成的输出即为时间点 t 的列向量和解数组 y。y 中的每一行都与 t 的相应行中返回的时间相对应。y 的第一列与 相对应,第二列与 相对应。
[t,y] = ode78(@vdp1,[0 20],[2; 0]);
绘制 和 的解对 t 的图。
plot(t,y(:,1),'-o',t,y(:,2),'-o') title('Solution of van der Pol Equation (\mu = 1) with ODE78'); xlabel('Time t'); ylabel('Solution y'); legend('y_1','y_2')
ode78 仅适用于使用两个输入参量(t 和 y)的函数。但是,通过在函数外部定义参数并在指定函数句柄时传递这些参数,可以传入额外参数。
解算 ODE
将该方程重写为一阶方程组可以得到
此示例末尾的局部函数 odefcn 将此方程组表示为接受四个输入参量(t、y、A 和 B)的函数。
function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
使用 ode78 解算 ODE。指定函数句柄,使其将 A 和 B 的预定义值传递给 odefcn。
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode78(@(t,y) odefcn(t,y,A,B), tspan, y0);
绘制结果。
plot(t,y(:,1),'-o',t,y(:,2),'-.')

function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
与 ode45 相比,ode113、ode78 和 ode89 求解器可以更好地求解具有严格误差容限的问题。这些求解器更胜一筹的常见情况是在轨道动力学问题中,这些问题的解曲线是平滑的且在求解器的每个时间步中都需要很高的准确度。
二体问题涉及两个相互作用的质点 m1 和 m2 在一个公共平面上沿轨道运动。在本示例中,一个质点明显大于另一个。以较重的天体为原点,运动方程为:
其中
要求解该问题,首先使用以下替换公式转换为包含四个一阶 ODE 的方程组:
替换之后生成的一阶方程组为:
包含在此示例末尾的局部函数 twobodyode 为二体问题的方程组进行编码。
function dy = twobodyode(t,y) % Two-body problem with one mass much larger than the other. r = sqrt(y(1)^2 + y(3)^2); dy = [y(2); -y(1)/r^3; y(4); -y(3)/r^3]; end
使用 ode78 求解 ODE 方程组。对 RelTol 指定严格误差容限 1e-13,对 AbsTol 使用严格误差容限 1e-14。
opts = odeset('Reltol',1e-13,'AbsTol',1e-14,'Stats','on'); tspan = [0 10*pi]; y0 = [2 0 0 0.5]; [t,y] = ode78(@twobodyode, tspan, y0, opts);
341 successful steps 0 failed attempts 5797 function evaluations
plot(t,y) legend('x','x''','y','y''','Location','SouthEast') title('Position and Velocity Components')
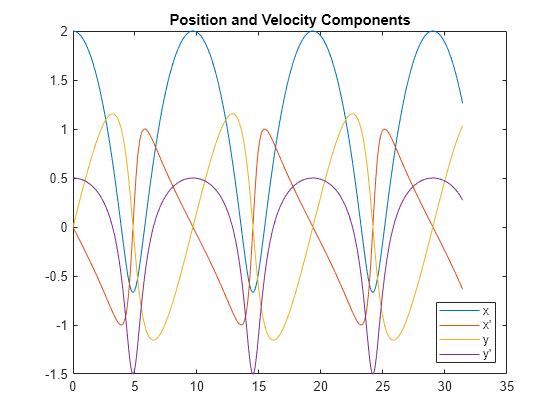
figure plot(y(:,1),y(:,3),'-o',0,0,'ro') axis equal title('Orbit of Smaller Mass')

与 ode45 相比,ode78 求解器能够通过更少的步骤和函数计算更快地获得解。
function dy = twobodyode(t,y) % Two-body problem with one mass much larger than the other. r = sqrt(y(1)^2 + y(3)^2); dy = [y(2); -y(1)/r^3; y(4); -y(3)/r^3]; end
输入参数
输出参量
算法
ode78 是 Verner 的“最高效”的 7 阶连续外推龙格-库塔 8(7) 法的一种实现。解的精度提升到了 8 阶。7 阶连续外推需要对 odefun 进行四次额外计算,但仅限于需要插值的步。
参考
[1] Verner, J. H. “Numerically Optimal Runge–Kutta Pairs with Interpolants.” Numerical Algorithms 53, no. 2–3 (March 2010): 383–396. https://doi.org/10.1007/s11075-009-9290-3.
扩展功能
版本历史记录
在 R2021b 中推出