complementaryFilter
Estimate orientation using complementary filter
Description
The complementaryFilter
System object™ fuses accelerometer, gyroscope, and magnetometer sensor data to estimate device
orientation and angular velocity.
To estimate orientation using this object:
Create the
complementaryFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
The complementaryFilter object assumes that the initial orientation of the
device aligns with the reference frame (NED or ENU) that you specify using the
RF
Creation
Syntax
Description
FUSE = complementaryFiltercomplementaryFilter
System object, FUSE, for sensor fusion of accelerometer, gyroscope, and
magnetometer data to estimate device orientation and angular velocity.
FUSE = complementaryFilter('ReferenceFrame',RF)complementaryFilter
System object that fuses accelerometer, gyroscope, and magnetometer data to estimate
device orientation relative to the reference frame RF.
FUSE = complementaryFilter(___,Name=Value)
Input Arguments
Properties
Usage
Syntax
Description
[
fuses accelerometer, gyroscope, and magnetometer data to compute orientation and angular
velocity. To use this syntax, set the orientation,angularVelocity] = FUSE(accelReadings,gyroReadings,magReadings)HasMagnetometer property as
true.
[
fuses accelerometer and gyroscope data to compute orientation and angular velocity. To use
this syntax, set the orientation,angularVelocity] = FUSE(accelReadings,gyroReadings)HasMagnetometer property as
false.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
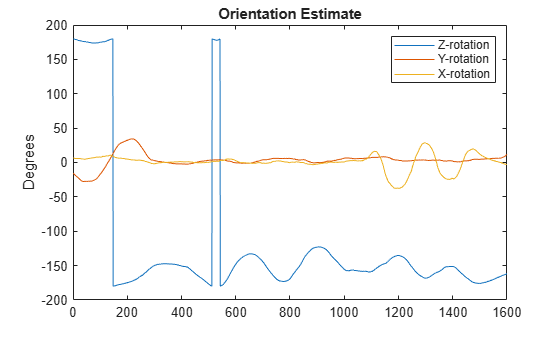
Load the rpy_9axis file, which contains recorded accelerometer, gyroscope, and magnetometer sensor data from a device oscillating in pitch (around y-axis), then yaw (around z-axis), and then roll (around x-axis). The file also contains the sample rate of the recording.
ld = load('rpy_9axis.mat');
accel = ld.sensorData.Acceleration;
gyro = ld.sensorData.AngularVelocity;
mag = ld.sensorData.MagneticField;Create a complementary filter object with sample rate equal to the frequency of the data.
Fs = ld.Fs; % Hz fuse = complementaryFilter('SampleRate', Fs);
Fuse accelerometer, gyroscope, and magnetometer data using the filter.
q = fuse(accel, gyro, mag);
Visualize the results.
plot(eulerd( q, 'ZYX', 'frame')); title('Orientation Estimate'); legend('Z-rotation', 'Y-rotation', 'X-rotation'); ylabel('Degrees');
References
[1] Valenti, R., I. Dryanovski, and J. Xiao. "Keeping a good attitude: A quaternion-based orientation filter for IMUs and MARGs." Sensors. Vol. 15, Number 8, 2015, pp. 19302-19330.
Extended Capabilities
Version History
Introduced in R2019b
See Also
ahrsfilter | imufilter | insCF