connect
Connect poses for given connection type
Syntax
Description
[
connects the start and goal poses using the specified pathSegments,pathCosts] = connect(connectionObj,start,goal)dubinsConnection
object. The path segment object with the lowest cost is returned.
[
returns all possible path segments as a cell array with their associated costs.pathSegments,pathCosts] = connect(connectionObj,start,goal,'PathSegments','all')
Examples
Create a dubinsConnection object.
dubConnObj = dubinsConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})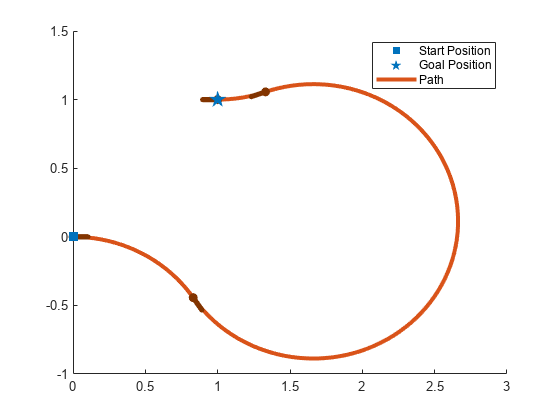
Create a reedsSheppConnection object.
reedsConnObj = reedsSheppConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019b