dubinsConnection
Dubins path connection type
Description
The dubinsConnection object holds information for computing a
dubinsPathSegment path segment to connect between poses. A Dubins path
segment connects two poses as a sequence of three motions. The motion options
are:
Straight
Left turn at maximum steer
Right turn at maximum steer
A Dubins path segment only allows motion in the forward direction.
Use this connection object to define parameters for a robot motion model, including the
minimum turning radius and options for path types. To generate a path segment between poses
using this connection type, call the connect
function.
Creation
Description
dubConnObj = dubinsConnection
dubConnObj = dubinsConnection(Name,Value)
Properties
Object Functions
connect | Connect poses for given connection type |
Examples
Create a dubinsConnection object.
dubConnObj = dubinsConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})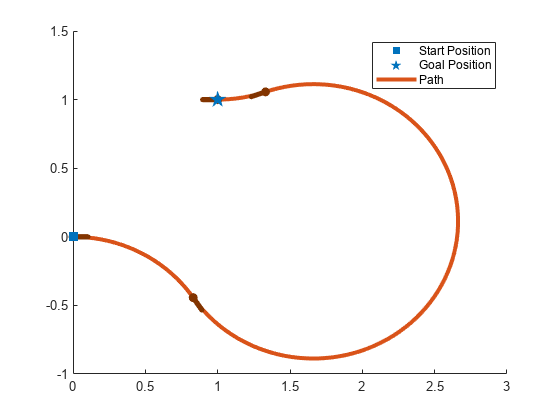
Create a dubinsConnection object.
dubConnObj = dubinsConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
pathSegObj = connect(dubConnObj,startPose,goalPose);
Show the generated path. Notice the direction of the turns.
show(pathSegObj{1})
pathSegObj{1}.MotionTypesans = 1×3 cell
{'R'} {'L'} {'R'}
Disable this specific motion sequence in a new connection object. Reduce the MinTurningRadius if the robot is more maneuverable. Connect the poses again to get a different path.
dubConnObj = dubinsConnection('DisabledPathTypes',{'RLR'}); dubConnObj.MinTurningRadius = 0.5; [pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose); pathSegObj{1}.MotionTypes
ans = 1×3 cell
{'L'} {'S'} {'L'}
show(pathSegObj{1})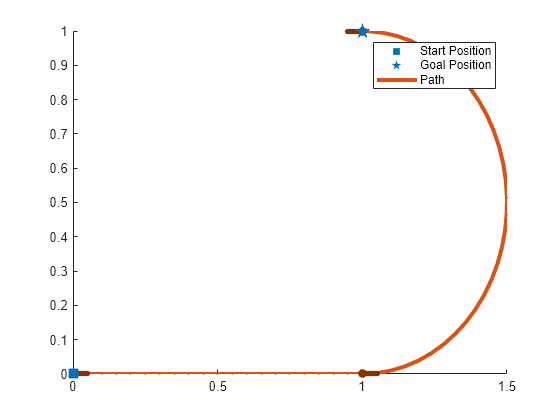
References
[1] Shkel, Andrei M., and Vladimir Lumelsky. "Classification of the Dubins set." Robotics and Autonomous Systems. Vol. 34, No. 4, 2001, pp. 179–202.
Extended Capabilities
Version History
Introduced in R2019b