successors
Description
Examples
Load navGraph data for states and links.
load navGraphData.matVisualize the navGraph object.
show(navGraphObj);
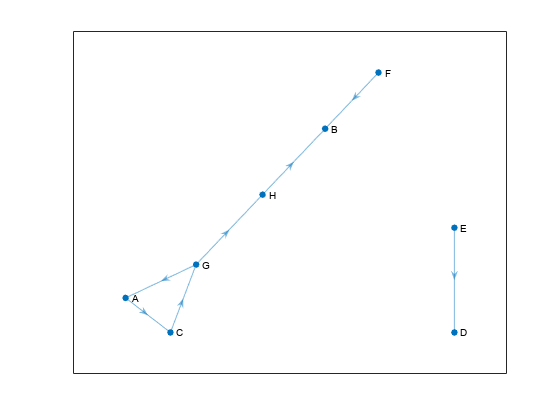
Find successive state indices and costs based on a state name.
[succIDS,costs] = successors(navGraphObj,"G")succIDS = 2×1
1
8
costs = 2×1
38.7759
13.9383
Find the state vectors of the successive states.
states = index2state(navGraphObj,succIDS)
states = 2×3
8.0000 2.0000 0.7218
8.0000 7.0000 0.6741
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2023a