navGraph
Description
The navGraph object is a graph data structure for Navigation Toolbox™ that aids search-based planners.
The navGraph object enables you to create a graph and perform
computations on it. The navGraph object supports functionalities that are
frequently used by graph search algorithms. You can easily implement Dijkstra, A*, or variants
using navGraph.
In graph theory, states represent nodes and links represent edges. The states and links
are represented by their corresponding row index in the table. The navGraph
is a directed graph that currently supports unique names, with no self-loops in edges.
Creation
Syntax
Description
graph = navGraphnavGraph object, graph. Add states and links by
using the Object
Functions.
graph = navGraph(___,Name=Value)Name and
Weight
name-value arguments in addition to the argument from the previous syntax.
graph = navGraph(stateTable,linkTable)navGraph object with the specified state table and link table,
which contain the metadata for the graph. The stateTable and
linkTable inputs set the value of the States and
Links
properties, respectively.
graph = navGraph(___,Name=Value)LinkWeightFcn
name-value argument in addition to the arguments from the previous syntaxes.
Input Arguments
Name-Value Arguments
Properties
Object Functions
addstate | Add one or more states to graph |
addlink | Add links between one or more state pairs |
rmstate | Remove one or more states from graph |
rmlink | Remove links between one or more state pairs |
findlink | Find IDs of links |
findstate | Find IDs of states |
index2state | Find state vectors of state indices |
state2index | Find indices for queried state vectors |
successors | Find successive state indices and costs |
show | Plot graph representation |
copy | Create deep copy of navGraph object |
Examples
Load data for states and links.
load navGraphData.matCreate state and link tables.
stateTable = table(data.states,data.names,data.numLanes, ... VariableNames=["StateVector","Name","Lanes"]); linkTable = table(data.links,data.linkWt,data.curvature, ... VariableNames=["EndStates","Weight","Curvature"]);
Create a navGraph object from the state and link tables.
graphObj = navGraph(stateTable,linkTable);
Create a deep copy of the navGraph object.
graph2 = copy(graphObj)
graph2 =
navGraph with properties:
States: [8×3 table]
Links: [7×3 table]
LinkWeightFcn: @nav.algs.distanceEuclidean
Visualize the navGraph object.
show(graphObj)
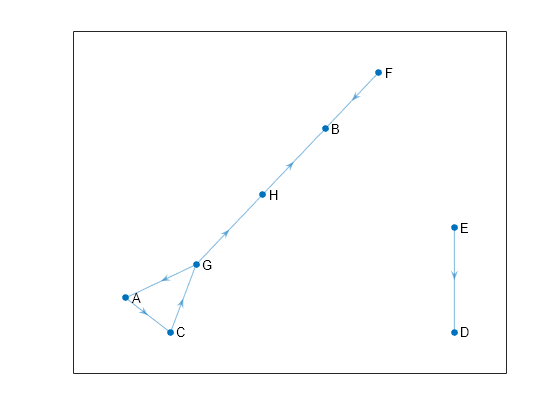
Find the link IDs of two state pairs. The function returns the link ID for the state pair ["G","A"]. However, it returns 0 as the link ID for the state pair ["C","D"] as the link does not exist in the navGraph object.
linkIDS = findlink(navGraphObj,["G","A"; "C","D"])
linkIDS = 2×1
5
0
Extended Capabilities
Version History
Introduced in R2023aSee Also
Objects
Functions
findlink|findstate|index2state|state2index|successors|show|copy|addstate|addlink|rmstate|rmlink