navPath
Planned path
Description
The navPath object stores paths that are typically created by
geometric path planners. Path points are stored as states in an associated state
space.
Creation
Syntax
Description
path = navPathpath, using the SE(2) state space with default settings.
path = navPath(space)space. The
space input also sets the value of the StateSpace
property.
path = navPath(space,states)states.
Specify states as a matrix of state samples. States that are outside
of the StateBounds of the state space object are
reduced to the bounds. The states input also sets the value of the
States
property.
path = navPath(space,states,maxNumStates)maxNumStates. The maxNumStates input also sets
the value of the MaxNumStates
property.
Properties
Object Functions
append | Add states to end of path |
copy | Create copy of path object |
interpolate | Interpolate points along path |
pathLength | Length of path |
Examples
Create a navPath object based on multiple waypoints in a Dubins space.
dubinsSpace = stateSpaceDubins([0 25; 0 25; -pi pi])
dubinsSpace =
stateSpaceDubins with properties:
SE2 Properties
Name: 'SE2 Dubins'
StateBounds: [3×2 double]
NumStateVariables: 3
Dubins Vehicle Properties
MinTurningRadius: 1
pathobj = navPath(dubinsSpace)
pathobj =
navPath with properties:
StateSpace: [1×1 stateSpaceDubins]
States: [0×3 double]
NumStates: 0
MaxNumStates: Inf
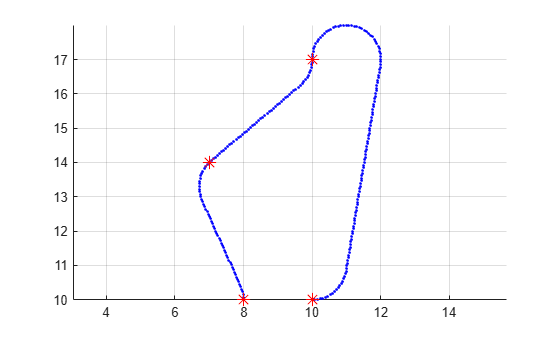
waypoints = [8 10 pi/2;
7 14 pi/4;
10 17 pi/2;
10 10 -pi];
append(pathobj,waypoints)Interpolate that path so that it contains exactly 250 points.
interpolate(pathobj,250)
Visualize the interpolated path and the original waypoints.
figure grid on axis equal hold on plot(pathobj.States(:,1),pathobj.States(:,2),".b") plot(waypoints(:,1),waypoints(:,2),"*r","MarkerSize",10)
Calculate length of path.
len = pathLength(pathobj);
disp("Path length = " + num2str(len))Path length = 19.4722
Load a 3-D occupancy map of a city block into the workspace. Specify the threshold to consider cells as obstacle-free.
mapData = load("dMapCityBlock.mat");
omap = mapData.omap;
omap.FreeThreshold = 0.5;Inflate the occupancy map to add a buffer zone for safe operation around the obstacles.
inflate(omap,1)
Create an SE(3) state space object with bounds for state variables.
ss = stateSpaceSE3([0 220;0 220;0 100;inf inf;inf inf;inf inf;inf inf]);
Create a navPath object based on multiple waypoints in an SE(3) state space.
path = navPath(ss);
waypoints = [40 180 15 0.7 0.2 0 0.1;
55 120 20 0.6 0.2 0 0.1;
100 100 25 0.5 0.2 0 0.1;
130 90 30 0.4 0 0.1 0.6;
150 33 35 0.3 0 0.1 0.6];
append(path,waypoints)Interpolate that path so that it contains exactly 250 points.
interpolate(path,250)
Visualize the interpolated path and the original waypoints.
show(omap) axis equal view([-10 55]) hold on % Start state scatter3(waypoints(1,1),waypoints(1,2),waypoints(1,3),"g","filled") % Goal state scatter3(waypoints(end,1),waypoints(end,2),waypoints(end,3),"r","filled") % Intermediate waypoints scatter3(waypoints(2:end-1,1),waypoints(2:end-1,2), ... waypoints(2:end-1,3),"y","filled") % Path plot3(path.States(:,1),path.States(:,2),path.States(:,3), ... "r-",LineWidth=2)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 5 objects of type patch, scatter, line.](../../examples/nav/win64/CreateNavPathBasedOnMultipleWaypointsInSE3StateSpaceExample_01.png)
Calculate length of path.
len = pathLength(path);
disp("Path length = " + num2str(len))Path length = 204.1797
Extended Capabilities
Version History
Introduced in R2019b