occupancyMap3D
Create 3-D occupancy map
Description
The occupancyMap3D object represents a 3-D environment using
an octree data
structure, where each node stores a probabilistic value indicating the
likelihood of occupancy. This probabilistic octree enables efficient modeling of
arbitrary environments, dynamically expanding its size as you add new observations. You
can update the map using point clouds or specific xyz-locations, and
the octree structure automatically manages memory and disk usage by trimming data as
needed.
Creation
Description
omap = occupancyMap3D
omap = occupancyMap3D(res)Resolution property.
omap = occupancyMap3D(res,Name,Value)"FreeThreshold",0.25 sets the threshold to consider
cells obstacle-free as a probability value of 0.25.
Properties
Object Functions
checkOccupancy | Check if locations are free or occupied |
getOccupancy | Get occupancy probability of locations |
inflate | Inflate each occupied location |
insertPointCloud | Insert 3-D points or point cloud observation into map |
rayIntersection | Find intersection points of rays and occupied map cells |
setOccupancy | Set occupancy probability of locations |
show | Display 3-D occupancy map |
updateOccupancy | Update occupancy probability at locations |
Examples
The occupancyMap3D object stores obstacles in 3-D space, using sensor observations to map an environment. Create a map and add points from a point cloud to identify obstacles. Then inflate the obstacles in the map to ensure safe operating space around obstacles.
Create an occupancyMap3D object with a map resolution of 10 cells/meter.
map3D = occupancyMap3D(10);
Define a set of 3-D points as an observation from a pose [x y z qw qx qy qz]. This pose is for the sensor that observes these points and is centered on the origin. Define two sets of points to insert multiple observations.
pose = [ 0 0 0 1 0 0 0]; points = repmat((0:0.25:2)', 1, 3); points2 = [(0:0.25:2)' (2:-0.25:0)' (0:0.25:2)']; maxRange = 5;
Insert the first set of points using insertPointCloud. The function uses the sensor pose and the given points to insert observations into the map. The colors displayed correlate to the height of the point only for illustrative purposes.
insertPointCloud(map3D,pose,points,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_01.png)
Insert the second set of points. The ray between the sensor pose (origin) and these points overlap points from the previous insertion. Therefore, the free space between the sensor and the new points are updated and marked as free space.
insertPointCloud(map3D,pose,points2,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_02.png)
Inflate the map to add a buffer zone for safe operation around obstacles. Define the vehicle radius and safety distance and use the sum of these values to define the inflation radius for the map.
vehicleRadius = 0.2; safetyRadius = 0.3; inflationRadius = vehicleRadius + safetyRadius; inflate(map3D, inflationRadius); show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_03.png)
Algorithms
The octree data structure is a hierarchical structure used for subdivision of an environment into cubic volumes called voxels. For a given map volume, the space is recursively subdivided into eight voxels until it achieves a desired map resolution (voxel size). This subdivision can be represented as a tree, which stores probability values for locations in the map.
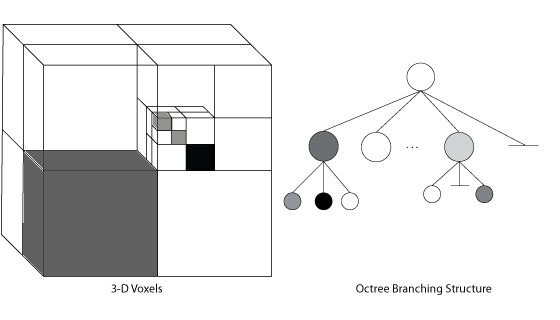
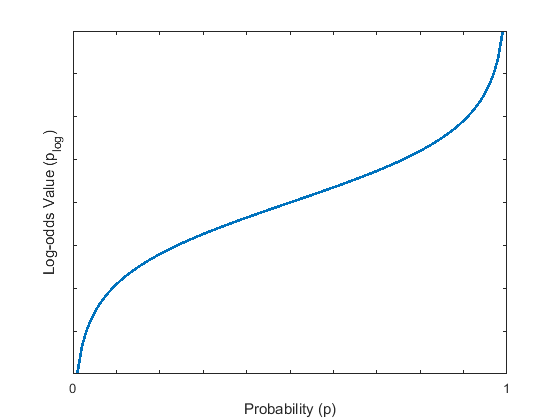
The probability values in the tree have a log-odds representation. This representation enables locations to easily recover from dynamic observations, and reduces numerical errors due to small probabilities. To remain efficient in memory, lower branches of the tree are pruned in the structure if they share the same occupancy values using this log-odds representation.
The object handles the organization of this data structure, including the pruning
of branches, internally. When using functions such as setOccupancy, getOccupancy, or insertPointCloud, specify all observations as spatial coordinates.
The object determines insertions into the tree, and navigation through the tree,
based on the spatial coordinates and the resolution of the map.
References
[1] Hornung, Armin, Kai M. Wurm, Maren Bennewitz, Cyrill Stachniss, and Wolfram Burgard. "OctoMap: an efficient probabilistic 3D mapping framework based on octrees." Autonomous Robots 34, no. 3 (April 2013): 189–206. https://doi.org/10.1007/s10514-012-9321-0.
Extended Capabilities
Version History
Introduced in R2019b
See Also
Objects
Functions
checkMapCollision|insertPointCloud|inflate|setOccupancy|show|rosReadOccupancyMap3D(ROS Toolbox)