plannerControlRRT
Description
The plannerControlRRT object is a rapidly exploring random tree (RRT)
planner for solving kinematic and dynamic (kinodynamic) planning problems using controls. The
RRT algorithm is a tree-based motion planning routine that incrementally grows a search tree.
In kinematic planners, the tree grows by randomly sampling states in system configuration
space, and then attempts to propagate the nearest node toward that state. The state propagator
samples controls for reaching the state based on the kinematic model and control policies. As
the tree adds nodes, the sampled states span the search space and eventually connect the start
and goal states.
These are the control-based RRT algorithm steps:
Planner,
plannerControlRRT, requests a state from the state space.Planner finds the nearest state in the search tree based on cost.
State propagator,
mobileRobotPropagator, samples control commands and durations to propagate toward the target state.State propagator propagates toward the target state.
If the propagator returns a valid trajectory to the state, then add the state to the tree.
Optional: Attempt to direct trajectory toward final goal based on NumGoalExtension and GoalBias properties.
Continue searching until the search tree reaches the goal or satisfies other exit criteria.
The benefit of a kinodynamic planner like plannerControlRRT is that it is
guaranteed to return a sequence of states, controls, and references which comprise a
kinematically or dynamically feasibly path. The drawback to a kinodynamic planner is that the
kinematic propagations cannot guarantee that new states are exactly equal to the target states
unless there exists and analytic representation for a sequence of controls that drive the
system between two configurations with zero residual error. This means that kinodynamic
planners are typically asymptotically complete and guarantee kinematic feasibility, but often
can not guarantee asymptotic optimality.
Creation
Syntax
Description
controlPlanner = plannerControlRRT(propagator)StatePropagator property.
controlPlanner = plannerControlRRT(propagator,Name=Value)plannerControlRRT(propagator,ContinueAfterGoalReached=1) continues
to search for alternative paths after the tree first reaches the goal.
Properties
Object Functions
Examples
Plan control paths for a bicycle kinematic model with the mobileRobotPropagator object. Specify a map for the environment, set state bounds, and define a start and goal location. Plan a path using the control-based RRT algorithm, which uses a state propagator for planning motion and the required control commands.
Set State and State Propagator Parameters
Load a ternary map matrix and create an occupancyMap object. Create the state propagator using the map. By default, the state propagator uses a bicycle kinematic model.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Set the state bounds on the state space based on the map world limits.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Plan Path
Create the path planner from the state propagator.
planner = plannerControlRRT(propagator);
Specify the start and goal states.
start = [10 15 0]; goal = [40 30 0];
Plan a path between the states. For repeatable results, reset the random number generator before planning. The plan function outputs a navPathControl object, which contains the states, control commands, and durations.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1×1 mobileRobotPropagator]
States: [192×3 double]
Controls: [191×2 double]
Durations: [191×1 double]
TargetStates: [191×3 double]
NumStates: 192
NumSegments: 191
Visualize Results
Visualize the map and plot the path states.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](../../examples/nav/win64/PlanKinodynamicPathWithControlsForMobileRobotExample_01.png)
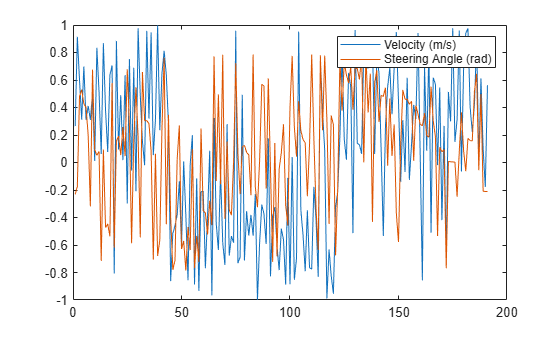
Display the [v psi] control inputs of forward velocity and steering angle.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
References
[1] S.M. Lavalle, J.J. Kuffner, "Randomized kinodynamic planning", International Journal of Robotics Research, vol. 20, no. 5, pp. 378-400, May 2001
[2] Kavraki, L. and S. LaValle. "Chapter 5 Motion Planning", 1st ed., B. Siciliano et O. Khatib, Ed. New York: Springer-Verlag Berlin Heidelberg, 2008, pp. 109-131.
Extended Capabilities
Version History
Introduced in R2021b