insertPointCloud
Description
insertPointCloud(
inserts a point cloud into the 3-D signed distance map by casting rays from the specified
origin to each of the specified points, and updates the distance values of all voxels the
digital differential analyzer (DDA) algorithm determines each ray hits.. The
sdm3D,origin,points)FullTracing property of the 3-D signed distance map determines the
raycasting type. See FullTracing for
more information.
Examples
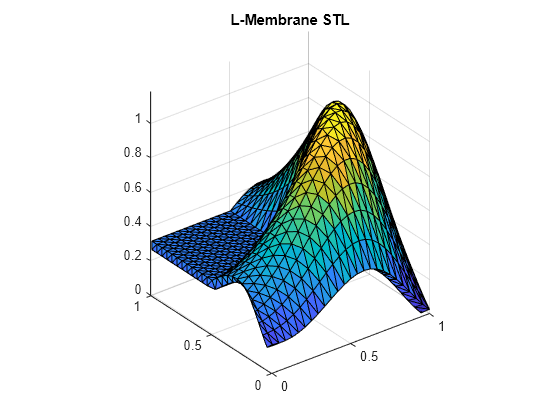
Read and plot the triangulation data from the L-membrane STL. You can use this to compare with the signed distance map.
triL = stlread("L-Membrane.stl"); trisurf(triL) title("L-Membrane STL") [az,el] = view; axis equal
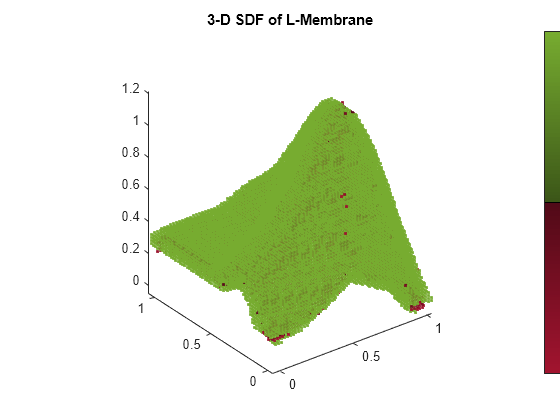
Create an empty 3-D signed distance field (SDF) and load the point cloud data for the L-membrane from a MAT file. The MAT file contains point cloud data and the sensor origin associated with each point cloud data.
sdm3D = signedDistanceMap3D(Resolution=50);
load LMembranePC.matInsert each point cloud into the signed distance field and show the updated 3-D SDF.
for i = 1:size(ptcloud,1) insertPointCloud(sdm3D,origin(i,:),ptcloud{i}); show(sdm3D,Colorbar="on"); view(az,el) axis equal drawnow pause(.25) end title(["3-D SDF of L-Membrane"])
Get all active voxels in the 3-D SDF.
vox = activeVoxels(sdm3D)
vox = struct with fields:
ID: 1
Centers: [49889×3 double]
Distances: [49889×1 double]
Sizes: [49889×1 double]
For demonstrative purposes, use a random xyz-offset from the voxel centers of the first three voxels as query points. Then get the distance and gradient using those query points.
querypts = vox.Centers(1:3,:) + 0.1*rand(3,3); d = distance(sdm3D,querypts)
d = 3×1
0.0379
-0.0447
0.0600
g = gradient(sdm3D,querypts)
g = 3×3
0.1924 1.5773 -1.4002
0.1689 1.6524 -0.8267
-0.0715 -0.2335 0.3677
Generate a mesh from the 3-D signed distance field.
[vertices,faces] = mesh(sdm3D)
vertices = 18860×3
-0.0100 0.0068 0.1500
-0.0300 0.0059 0.1500
-0.0100 0.0100 0.1610
-0.0300 0.0100 0.1565
0.0100 0.0047 0.1500
-0.0100 -0.0100 0.1409
0.0100 -0.0100 0.1421
0.0100 0.0025 0.1700
-0.0010 0.0100 0.1700
0.0100 0.0094 0.1900
0.0089 0.0100 0.1900
0.0100 0.0100 0.1909
-0.0100 0.0187 0.1700
-0.0300 0.0259 0.1700
-0.0100 0.0552 0.1500
⋮
faces = 37094×3
2 1 3
4 2 3
7 1 6
5 1 7
9 3 1
9 1 8
8 1 5
8 10 11
9 8 11
10 12 11
3 14 4
13 14 3
15 16 17
16 18 17
9 13 3
⋮
Visualize the mesh data.
meshTri = triangulation(faces,vertices); trisurf(meshTri) axis equal title("Mesh from 3-D SDF")
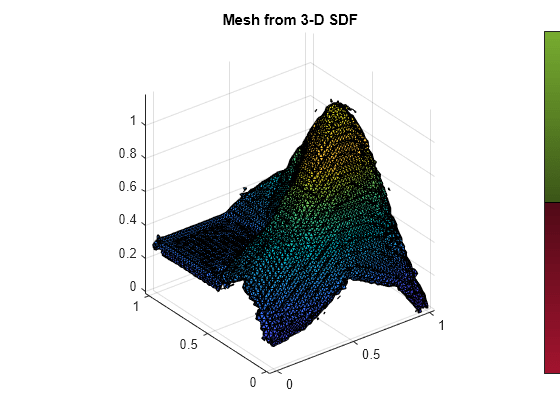
If needed, you can use this mesh data to create a collision mesh using V-HACD. See collisionVHACD (Robotics System Toolbox) for more information.
Input Arguments
Extended Capabilities
Version History
Introduced in R2024b