isMotionValid
Check if path between states is valid
Description
Examples
This example shows how to validate paths through an environment.
Load example maps. Use the simple map to create a binary occupancy map.
load exampleMaps.mat
map = occupancyMap(simpleMap);
show(map)![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/nav/win64/ValidatePathThroughOccupancyMapEnvironmentExample_01.png)
Specify a coarse path through the map.
path = [2 2 pi/2; 10 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line.](../../examples/nav/win64/ValidatePathThroughOccupancyMapEnvironmentExample_02.png)
Create a state validator using the stateSpaceSE2 definition. Specify the map and the distance for interpolating and validating path segments.
validator = validatorOccupancyMap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
Check the points of the path are valid states. All three points are in free space, so are considered valid.
isValid = isStateValid(validator,path)
isValid = 3×1 logical array
1
1
1
Check the motion between each sequential path states. The isMotionValid function interpolates along the path between states. If a path segment is invalid, plot the last valid point along the path.
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, line. One or more of the lines displays its values using only markers](../../examples/nav/win64/ValidatePathThroughOccupancyMapEnvironmentExample_03.png)
This example shows how to validate paths through an environment.
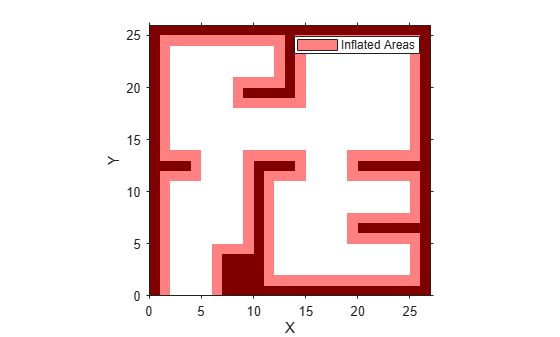
Load example maps. Use the simple map to create a vehicle cost map. Specify an inflation radius of 1 meter.
load exampleMaps.mat map = vehicleCostmap(double(simpleMap)); map.CollisionChecker = inflationCollisionChecker("InflationRadius",1); plot(map)
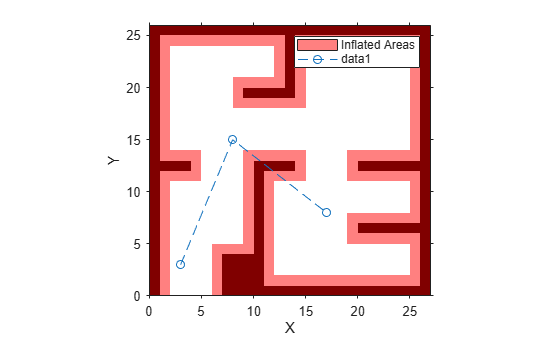
Specify a coarse path through the map.
path = [3 3 pi/2; 8 15 0; 17 8 -pi/2]; hold on plot(path(:,1),path(:,2),"--o")
Create a state validator using the stateSpaceSE2 definition. Specify the map and the distance for interpolating and validating path segments.
validator = validatorVehicleCostmap(stateSpaceSE2); validator.Map = map; validator.ValidationDistance = 0.1;
Check the points of the path are valid states. All three points are in free space, so are considered valid.
isValid = isStateValid(validator,path)
isValid = 3×1 logical array
1
1
1
Check the motion between each sequential path states. The isMotionValid function interpolates along the path between states. If a path segment is invalid, plot the last valid point along the path.
startStates = [path(1,:);path(2,:)];
endStates = [path(2,:);path(3,:)];
for i = 1:2
[isPathValid, lastValid] = isMotionValid(validator,startStates(i,:),endStates(i,:));
if ~isPathValid
plot(lastValid(1),lastValid(2),'or')
end
end
hold off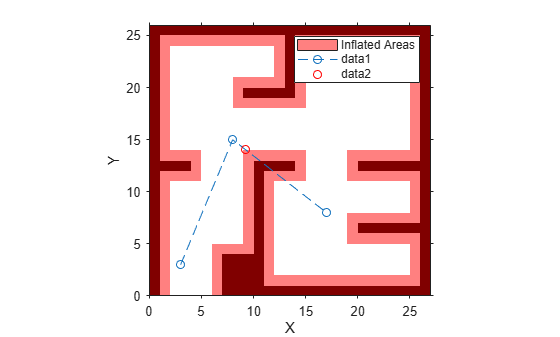
Create a 3-D occupancy map and associated state validator. Plan, validate, and visualize a path through the occupancy map.
Load and Assign Map to State Validator
Load a 3-D occupancy map of a city block into the workspace. Specify a threshold for which cells to consider as obstacle-free.
mapData = load('dMapCityBlock.mat');
omap = mapData.omap;
omap.FreeThreshold = 0.5;Inflate the occupancy map to add a buffer zone for safe operation around the obstacles.
inflate(omap,1)
Create an SE(3) state space object with bounds for state variables.
ss = stateSpaceSE3([-20 220;
-20 220;
-10 100;
inf inf;
inf inf;
inf inf;
inf inf]);Create a 3-D occupancy map state validator using the created state space.
sv = validatorOccupancyMap3D(ss);
Assign the occupancy map to the state validator object. Specify the sampling distance interval.
sv.Map = omap; sv.ValidationDistance = 0.1;
Plan and Visualize Path
Create a path planner with increased maximum connection distance. Reduce the maximum number of iterations.
planner = plannerRRT(ss,sv); planner.MaxConnectionDistance = 50; planner.MaxIterations = 1000;
Create a user-defined evaluation function for determining whether the path reaches the goal. Specify the probability of choosing the goal state during sampling.
planner.GoalReachedFcn = @(~,x,y)(norm(x(1:3)-y(1:3))<5); planner.GoalBias = 0.1;
Set the start and goal states.
start = [40 180 25 0.7 0.2 0 0.1]; goal = [150 33 35 0.3 0 0.1 0.6];
Plan a path using the specified start, goal, and planner.
[pthObj,solnInfo] = plan(planner,start,goal);
Check that the points of the path are valid states.
isValid = isStateValid(sv,pthObj.States)
isValid = 7×1 logical array
1
1
1
1
1
1
1
Check that the motion between each sequential path state is valid.
isPathValid = zeros(size(pthObj.States,1)-1,1,'logical'); for i = 1:size(pthObj.States,1)-1 [isPathValid(i),~] = isMotionValid(sv,pthObj.States(i,:),... pthObj.States(i+1,:)); end isPathValid
isPathValid = 6×1 logical array
1
1
1
1
1
1
Visualize the results.
show(omap) hold on scatter3(start(1,1),start(1,2),start(1,3),'g','filled') % draw start state scatter3(goal(1,1),goal(1,2),goal(1,3),'r','filled') % draw goal state plot3(pthObj.States(:,1),pthObj.States(:,2),pthObj.States(:,3),... 'r-','LineWidth',2) % draw path
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 4 objects of type patch, scatter, line.](../../examples/nav/win64/ValidatePathThrough3DOccupancyMapEnvironmentExample_01.png)
Input Arguments
Output Arguments
Version History
Introduced in R2019b
See Also
isStateValid | stateSpaceSE2 | nav.StateSpace | nav.StateValidator