绘图函数
在执行过程中对优化绘图
您可以在求解器的执行过程中绘制各种进度测度。使用 optimoptions 的 PlotFcn 名称-值参量为求解器指定一个或多个绘图函数,以在每次迭代时调用。传递函数句柄、函数名称或者由函数句柄或函数名称组成的元胞数组作为 PlotFcn 值。
每个求解器都有多个可用的预定义绘图函数。有关详细信息,请参阅求解器的函数参考页上的 PlotFcn 选项描述。
您也可以使用自定义绘图函数,如创建自定义绘图函数中所示。使用与输出函数相同的结构体编写一个函数文件。有关此结构体的详细信息,请参阅输出函数和绘图函数语法。
使用预定义的绘图函数
此示例说明如何使用绘图函数查看 fmincon "interior-point" 算法的进度。此问题取自使用优化实时编辑器任务或求解器的有约束非线性问题。
编写非线性目标函数和约束函数,包括其梯度。目标函数是罗森布罗克函数。
function [f,g] = rosenbrockwithgrad(x) % Calculate objective f f = 100*(x(2) - x(1)^2)^2 + (1-x(1))^2; if nargout > 1 % gradient required g = [-400*(x(2)-x(1)^2)*x(1)-2*(1-x(1)); 200*(x(2)-x(1)^2)]; end end
约束函数的解满足 norm(x)^2 <= 1。
function [ineqnonlin,eqnonlin,gradineqnonlin,gradeqnonlin] = unitdisk2(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = [ ]; if nargout > 2 gradineqnonlin = [2*x(1);2*x(2)]; gradeqnonlin = []; end end
为求解器创建包括调用三个绘图函数的 options 结构体。
options = optimoptions(@fmincon,Algorithm="interior-point",... SpecifyObjectiveGradient=true,SpecifyConstraintGradient=true,... PlotFcn={@optimplotx,@optimplotfval,@optimplotfirstorderopt});
创建初始点 x0 = [0,0],并将其余输入设置为空 ([])。
x0 = [0,0]; A = []; b = []; Aeq = []; beq = []; lb = []; ub = [];
调用 fmincon,包括选项。
fun = @rosenbrockwithgrad; nonlcon = @unitdisk2; x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
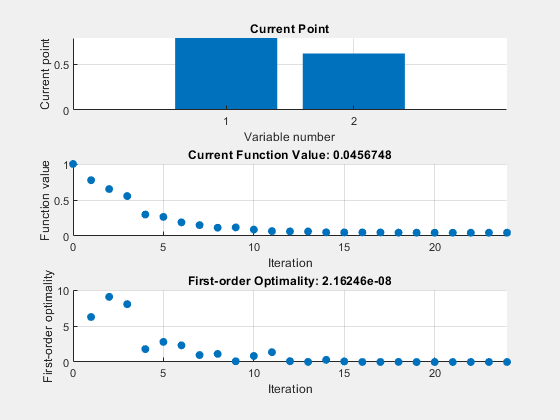
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
0.7864 0.6177
创建自定义绘图函数
要为 Optimization Toolbox™ 求解器创建自定义绘图函数,请使用以下语法编写函数
function stop = plotfun(x,optimValues,state) stop = false; switch state case "init" % Set up plot case "iter" % Plot points case "done" % Clean up plots % Some solvers also use case "interrupt" end end
Global Optimization Toolbox 求解器使用不同语法。
软件将 x、optimValues 和 state 数据传递给绘图函数。有关完整的语法详细信息和 optimValues 参量中的数据列表,请参阅输出函数和绘图函数语法。使用 PlotFcn 名称-值参量将绘图函数名称传递给求解器。
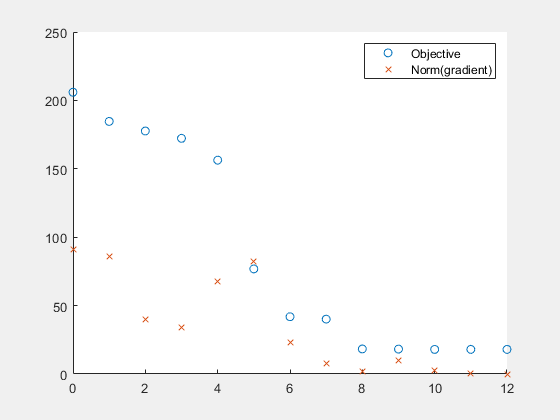
例如,在此示例末尾列出的 plotfandgrad 辅助函数绘制标量值目标函数的目标函数值和梯度范数。使用此示例末尾列出的 ras 辅助函数作为目标函数。ras 函数包括梯度计算,因此为了提高效率,请将 SpecifyObjectiveGradient 名称-值参量设置为 true。
fun = @ras; rng(1) % For reproducibility x0 = 10*randn(2,1); % Random initial point opts = optimoptions(@fminunc,SpecifyObjectiveGradient=true,PlotFcn=@plotfandgrad); [x,fval] = fminunc(fun,x0,opts)
Local minimum found. Optimization completed because the size of the gradient is less than the value of the optimality tolerance. <stopping criteria details>
x = 2×1
1.9949
1.9949
fval = 17.9798
绘图显示梯度的范数收敛于零,与无约束优化的预期相符。
辅助函数
以下代码会创建 plotfandgrad 辅助函数。
function stop = plotfandgrad(x,optimValues,state) persistent iters fvals grads % Retain these values throughout the optimization stop = false; switch state case "init" iters = []; fvals = []; grads = []; case "iter" iters = [iters optimValues.iteration]; fvals = [fvals optimValues.fval]; grads = [grads norm(optimValues.gradient)]; plot(iters,fvals,"o",iters,grads,"x"); legend("Objective","Norm(gradient)") case "done" end end
以下代码会创建 ras 辅助函数。
function [f,g] = ras(x) f = 20 + x(1)^2 + x(2)^2 - 10*cos(2*pi*x(1) + 2*pi*x(2)); if nargout > 1 g(2) = 2*x(2) + 20*pi*sin(2*pi*x(1) + 2*pi*x(2)); g(1) = 2*x(1) + 20*pi*sin(2*pi*x(1) + 2*pi*x(2)); end end