使用优化实时编辑器任务或求解器的有约束非线性问题
典型优化问题
此示例说明如何使用 Optimization Toolbox™ 求解器求解有约束非线性问题。该示例展示了典型的工作流:创建目标函数、创建约束、求解问题和检查结果。
此示例提供两种求解问题的方法。一种方法使用优化实时编辑器任务,这是一种可视化方法。另一种方法使用 MATLAB® 命令行,这是一种基于文本的方法。您也可以使用基于问题的方法来求解这类问题;请参阅基于问题求解有约束非线性问题:。
问题表示:罗森布罗克函数
问题可以表示为在单位圆盘上最小化罗森布罗克函数
(单位圆盘指以原点为中心、半径为 1 的圆盘)。也就是说,基于数据集 ,求最小化函数 f(x) 的 x。此问题是最小化具有非线性约束的非线性函数。
注意
罗森布罗克函数是优化中的标准测试函数。它在点 [1,1] 点有一个唯一最小值 0。对于某些算法来说,求最小值是一个挑战,因为函数在深度弯曲的波谷中有一个低浅最小值。此问题的解不在 [1,1] 点处,因为该点不满足约束。
以下图窗显示单位圆盘中罗森布罗克函数的两个视图。垂直轴采用对数刻度;换句话说,绘图显示 log(1+f(x))。等高线位于曲面图下方。
经过对数尺度变换的罗森布罗克函数:两个视图。
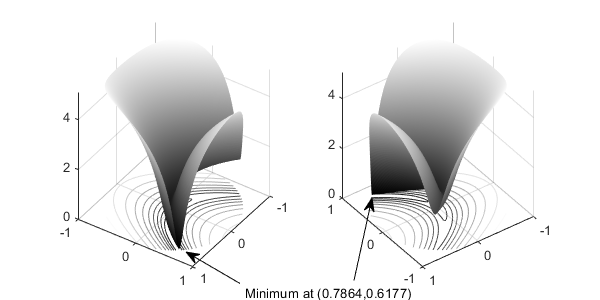
函数 f(x) 称为目标函数。目标函数是您要进行最小化的函数。不等式 称为约束。约束限制求解器用于搜索最小值的 x 集。您可以使用任意数量的约束,约束可以是不等式,也可以是等式。
所有 Optimization Toolbox 优化函数都可用于最小化目标函数。要最大化函数 f,请应用优化例程来最小化 –f。有关最大化的详细信息,请参阅对目标进行最大化。
使用优化实时编辑器任务定义和求解问题
优化实时编辑器任务允许您使用可视化方法设置和求解问题。
点击主页选项卡文件部分的新建实时脚本按钮,创建一个新的实时脚本。

插入一个优化实时编辑器任务。点击插入选项卡,然后在代码部分中选择任务 > 优化。
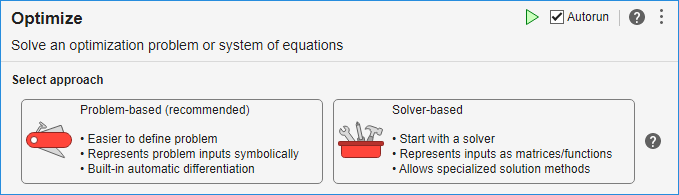
选择基于求解器的任务。
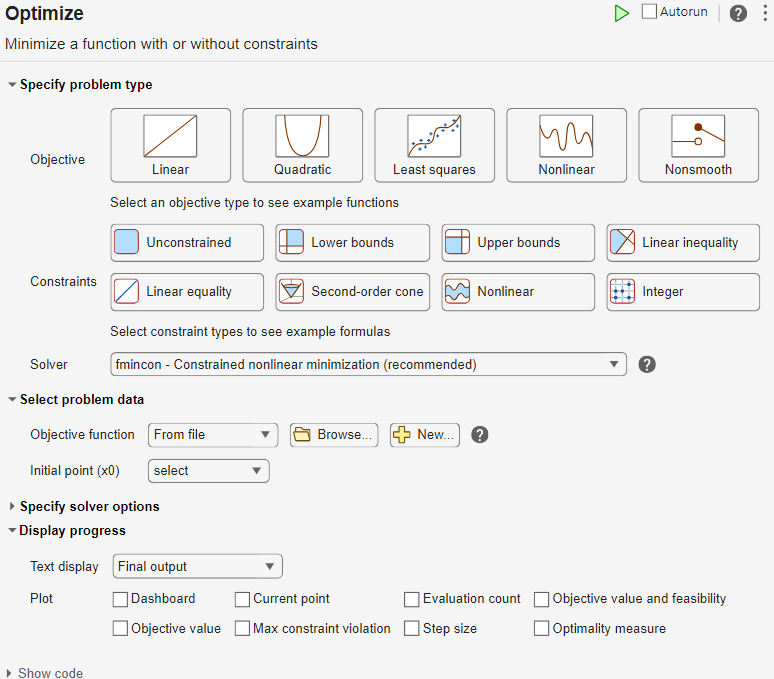
在任务的指定问题类型节中,选择目标 > 非线性和约束 > 非线性。该任务选择求解器 fmincon - 有约束非线性最小化。
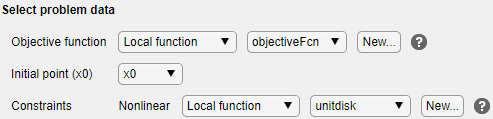
包括罗森布罗克函数作为目标函数。在任务的选择问题数据节中,选择目标函数 > 局部函数,然后点击新建... 按钮。新局部函数出现在任务下的一个节中。
function f = objectiveFcn(optimInput) % Example: % Minimize Rosenbrock's function % f = 100*(y - x^2)^2 + (1 - x)^2 % Edit the lines below with your calculation x = optimInput(1); y = optimInput(2); f = 100*(y - x^2)^2 + (1 - x)^2; end
此函数实现罗森布罗克函数。
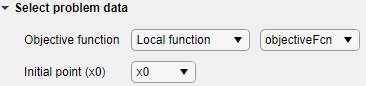
在任务的选择问题数据节中,选择目标函数 > objectiveFcn。
将初始点
x0 = [0;0]放入 MATLAB 工作区中。通过点击任务,然后点击插入选项卡上的分节符按钮,在优化任务上方插入一个新节。在任务上方的新节中,输入以下初始点代码。x0 = [0;0];
通过按 Ctrl+Enter 运行该节。此操作会将
x0放入工作区中。在任务的选择问题数据节中,选择初始点(x0) > x0。
在选择问题数据节中,选择约束 > 非线性 > 局部函数,然后点击新建... 按钮。新局部函数出现在前一个局部函数的下方。
按如下所示编辑新局部函数。
function [ineqnonlin,eqnonlin] = unitdisk(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = [ ]; end
在选择问题数据节中,选择 unitdisk 作为约束函数。
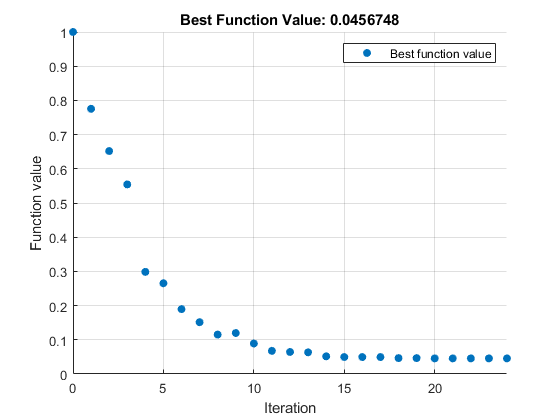
要监控求解器进度,请在任务的显示进度节中,选择文本显示 > 每次迭代。此外,为绘图选择目标值和可行性。

要运行求解器,请点击任务窗口右上角的选项按钮 ⁝,并选择运行节。绘图出现在单独的图窗窗口中和输出区域中。
输出区域显示一个迭代表,解释结果中有对它的进一步说明。
要找到解,请查看任务的顶部。

求解器将变量
solution和objectiveValue放置在工作区中。通过在任务下方插入新分节符并输入以下行来查看其值。
通过按 Ctrl+Enter 运行该节。
![solution = [0.7864,0.6177]. objectiveValue = 0.0457.](optimizelet_viewsolution_result.png)
要了解
fmincon得到结果的过程,请参阅解释结果。要显示优化为求解问题而生成的代码,请点击任务窗口右上角的选项按钮 ⁝,并选择控件和代码。
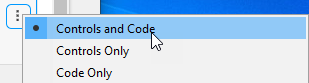
在任务的底部,出现以下代码。
% Set nondefault solver options options = optimoptions("fmincon",Display="iter",... PlotFcn="optimplotfvalconstr"); % Solve [solution,objectiveValue] = fmincon(@objectiveFcn,x0,[],[],[],[],[],[],... @unitdisk,options);
此代码是您在命令行中用于求解问题的代码,如下节中所述。
在命令行中定义和求解问题
在命令行中求解优化问题的第一步是选择求解器。请查阅优化决策表。对于具有非线性目标函数和非线性约束的问题,通常使用 fmincon 求解器。
请查阅 fmincon 函数参考页。求解器语法如下。
[x,fval] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
fun 和 nonlcon 输入分别表示目标函数和非线性约束函数。
以如下方式表达您的问题:
以 MATLAB 语言将目标函数定义为函数文件或匿名函数。此示例使用一个函数文件。
将约束定义为一个单独的文件或匿名函数。
函数文件是包含 MATLAB 命令的文本文件,扩展名为 .m。在任何文本编辑器中创建函数文件,或像此示例中一样使用内置的 MATLAB 编辑器。
在命令行中输入:
edit rosenbrock在 MATLAB 编辑器中输入:
%% ROSENBROCK(x) expects a two-column matrix and returns a column vector % The output is the Rosenbrock function, which has a minimum at % (1,1) of value 0, and is strictly positive everywhere else. function f = rosenbrock(x) f = 100*(x(:,2) - x(:,1).^2).^2 + (1 - x(:,1)).^2; end
注意
rosenbrock是向量化函数,它可以一次计算多个点处的值。请参阅向量化。向量化函数最适合绘图。对于非向量化版本,请输入:%% ROSENBROCK1(x) expects a two-element vector and returns a scalar % The output is the Rosenbrock function, which has a minimum at % (1,1) of value 0, and is strictly positive everywhere else. function f = rosenbrock1(x) f = 100*(x(2) - x(1)^2)^2 + (1 - x(1))^2; end
用名称
rosenbrock.m保存文件。
约束函数的形式为 ineqnonlin(x) ≤ 0 或 eqnonlin(x) = 0.约束 未采用求解器处理的形式。要使用正确的语法,请将约束重新表示为 。
非线性约束的语法会同时返回等式和不等式约束。此示例仅包含一个不等式约束,因此您必须将空数组 [] 作为等式约束函数 ceq 进行传递。
考虑到这些因素,为非线性约束编写一个函数文件。
创建一个名为
unitdisk.m的文件,其中包含以下代码:function [ineqnonlin,eqnonlin] = unitdisk(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = [ ]; end
保存
unitdisk.m文件。创建目标函数和约束函数的函数句柄。这些函数句柄指向函数,是求解器访问函数的一种方式。
fun = @rosenbrock; nonlcon = @unitdisk;
现在您已定义了目标函数和约束函数,接着创建其他 fmincon 输入。
为
fmincon创建选项,以使用"optimplotfvalconstr"绘图函数并返回迭代输出。options = optimoptions("fmincon",... PlotFcn="optimplotfvalconstr",... Display="iter");
创建初始点。
x0 = [0 0];
为此示例不使用的约束创建空项。
A = []; b = []; Aeq = []; beq = []; lb = []; ub = [];
通过调用 fmincon 求解问题。
[x,fval] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
First-order Norm of
Iter F-count f(x) Feasibility optimality step
0 3 1.000000e+00 0.000e+00 2.000e+00
1 13 7.753537e-01 0.000e+00 6.250e+00 1.768e-01
2 18 6.519648e-01 0.000e+00 9.048e+00 1.679e-01
3 21 5.543209e-01 0.000e+00 8.033e+00 1.203e-01
4 24 2.985207e-01 0.000e+00 1.790e+00 9.328e-02
5 27 2.653799e-01 0.000e+00 2.788e+00 5.723e-02
6 30 1.897216e-01 0.000e+00 2.311e+00 1.147e-01
7 33 1.513701e-01 0.000e+00 9.706e-01 5.764e-02
8 36 1.153330e-01 0.000e+00 1.127e+00 8.169e-02
9 39 1.198058e-01 0.000e+00 1.000e-01 1.522e-02
10 42 8.910052e-02 0.000e+00 8.378e-01 8.301e-02
11 45 6.771960e-02 0.000e+00 1.365e+00 7.149e-02
12 48 6.437664e-02 0.000e+00 1.146e-01 5.701e-03
13 51 6.329037e-02 0.000e+00 1.883e-02 3.774e-03
14 54 5.161934e-02 0.000e+00 3.016e-01 4.464e-02
15 57 4.964194e-02 0.000e+00 7.913e-02 7.894e-03
16 60 4.955404e-02 0.000e+00 5.462e-03 4.185e-04
17 63 4.954839e-02 0.000e+00 3.993e-03 2.208e-05
18 66 4.658289e-02 0.000e+00 1.318e-02 1.255e-02
19 69 4.647011e-02 0.000e+00 8.006e-04 4.940e-04
20 72 4.569141e-02 0.000e+00 3.136e-03 3.379e-03
21 75 4.568281e-02 0.000e+00 6.440e-05 3.974e-05
22 78 4.568281e-02 0.000e+00 8.000e-06 1.084e-07
23 81 4.567641e-02 0.000e+00 1.601e-06 2.793e-05
24 84 4.567482e-02 0.000e+00 2.023e-08 6.916e-06
Local minimum found that satisfies the constraints.
Optimization completed because the objective function is non-decreasing in
feasible directions, to within the value of the optimality tolerance,
and constraints are satisfied to within the value of the constraint tolerance.
x =
0.7864 0.6177
fval =
0.0457
退出消息指出,由于目标函数在约束允许方向上的导数接近 0,因此对约束下的最优值的搜索结束,并且解在要求的准确度内满足约束。消息中有一些语句包含指向所用词语的详细信息链接。有关这些链接的详细信息,请参阅增强版退出消息。
解释结果
实时编辑器任务输出区域和 MATLAB 命令行窗口中的迭代表显示 MATLAB 如何在单位圆盘中搜索罗森布罗克函数的最小值。根据您使用的工具箱版本和计算平台的不同,该表可能有所不同。以下说明适用于此示例中显示的表。
第一列(标记为
Iter)是从 0 到 24 的迭代序号。fmincon经过 24 次迭代后收敛。第二列(标记为
F-count)报告计算罗森布罗克函数的累计次数。最后一行显示F-count为 84,表明fmincon在求解最小值的过程中对罗森布罗克函数进行了 84 次计算。第三列(标记为
f(x))显示目标函数值。最终值4.567482e-2是在优化运行中报告的最小值,位于命令行窗口中退出消息的末尾。第四列
Feasibility对于所有迭代均为 0。此列显示在约束为正的每次迭代中约束函数unitdisk的值。由于unitdisk的值在所有迭代中均为负数,因此每次迭代都满足约束。
迭代表的其他列在迭代输出中有说明。