Solve Poisson Equation on Unit Disk Using Physics-Informed Neural Networks
This example shows how to solve the Poisson equation with Dirichlet boundary conditions using a physics-informed neural network (PINN). You generate the required data for training the PINN by using the PDE model setup.
The Poisson equation on a unit disk with zero Dirichlet boundary condition can be written as in , on , where is the unit disk. The exact solution is .
PDE Model Setup
Create the PDE model and include the geometry.
model = createpde; geometryFromEdges(model,@circleg);
Plot the geometry and display the edge labels for use in the boundary condition definition.
figure pdegplot(model,EdgeLabels="on"); axis equal
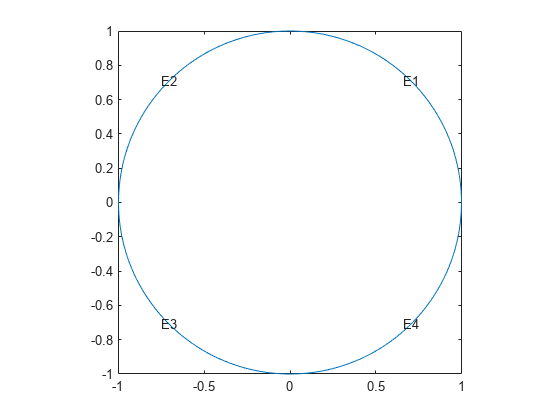
Specify zero Dirichlet boundary conditions on all edges.
applyBoundaryCondition(model,"dirichlet", ... Edge=1:model.Geometry.NumEdges,u=0);
Create a structural array of coefficients. Specify the coefficients for the PDE model.
pdeCoeffs.m = 0;
pdeCoeffs.d = 0;
pdeCoeffs.c = 1;
pdeCoeffs.a = 0;
pdeCoeffs.f = 1;
specifyCoefficients(model,m=pdeCoeffs.m,d=pdeCoeffs.d, ...
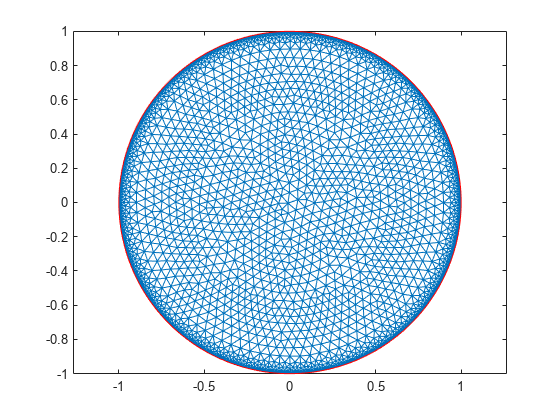
c=pdeCoeffs.c,a=pdeCoeffs.a,f=pdeCoeffs.f);Generate and plot a mesh with a large number of nodes on the boundary.
msh = generateMesh(model,Hmax=0.05,Hgrad=2, ... Hedge={1:model.Geometry.NumEdges,0.005}); figure pdemesh(model); axis equal
Generate Spatial Data for Training PINN
To train the PINN, model loss at the collocation points on the domain and boundary. The collocation points in this example are mesh nodes.
boundaryNodes = findNodes(msh,"region", ... Edge=1:model.Geometry.NumEdges); domainNodes = setdiff(1:size(msh.Nodes,2),boundaryNodes); domainCollocationPoints = msh.Nodes(:,domainNodes)';
Define Network Architecture
Define a multilayer perceptron architecture with four fully connected operations, each with 50 hidden neurons. The first fully connected operation has two input channels corresponding to the inputs x and y. The last fully connected operation has one output corresponding to u(x,y).
numNeurons = 50;
layers = [
featureInputLayer(2,Name="featureinput")
fullyConnectedLayer(numNeurons,Name="fc1")
tanhLayer(Name="tanh_1")
fullyConnectedLayer(numNeurons,Name="fc2")
tanhLayer(Name="tanh_2")
fullyConnectedLayer(numNeurons,Name="fc3")
tanhLayer(Name="tanh_3")
fullyConnectedLayer(1,Name="fc4")
];
pinn = dlnetwork(layers);Specify Training Options
Specify the number of epochs, mini-batch size, initial learning rate, and the learning rate decay.
numEpochs = 50; miniBatchSize = 500; initialLearnRate = 0.01; learnRateDecay = 0.005;
Convert the training data to dlarray (Deep Learning Toolbox) objects.
ds = arrayDatastore(domainCollocationPoints); mbq = minibatchqueue(ds,MiniBatchSize=miniBatchSize, ... MiniBatchFormat="BC", ... OutputEnvironment="cpu");
Initialize the average gradients and squared average gradients.
averageGrad = []; averageSqGrad = [];
Calculate the total number of iterations for the training progress monitor.
numIterations = numEpochs* ...
ceil(size(domainCollocationPoints,1)/miniBatchSize);Initialize the trainingProgressMonitor (Deep Learning Toolbox) object.
monitor = trainingProgressMonitor(Metrics="Loss", ... Info="Epoch", ... XLabel="Iteration");

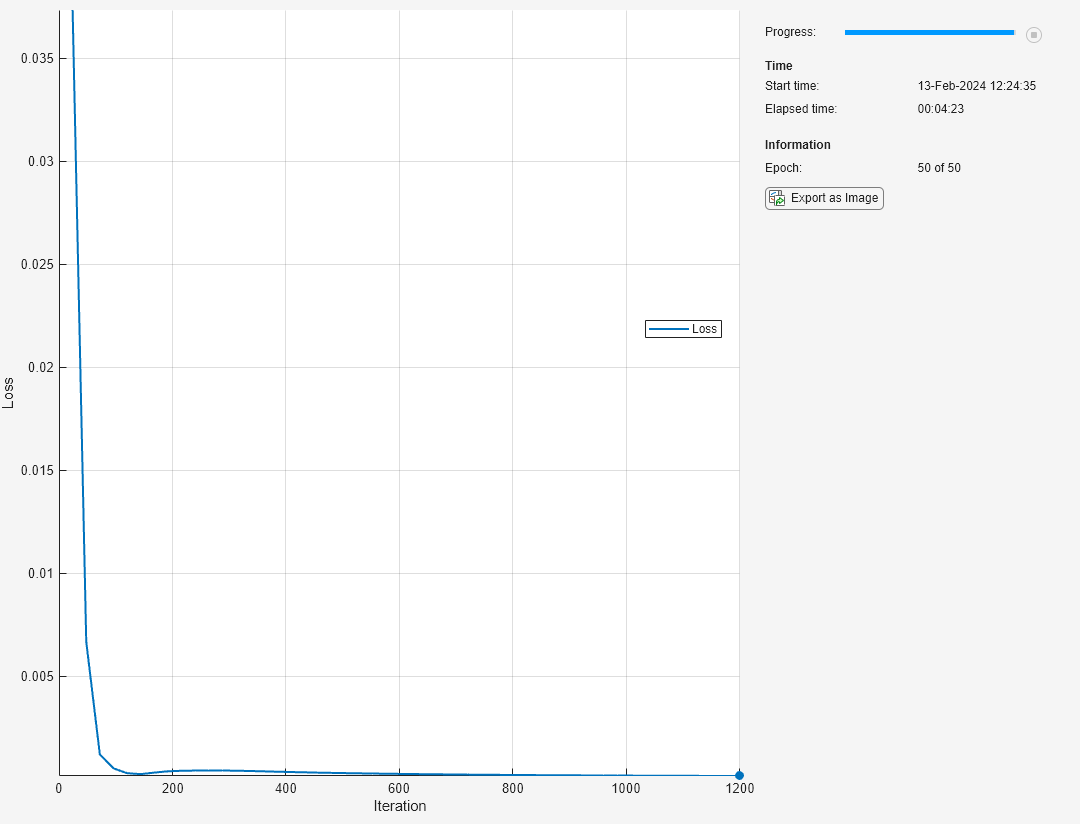
Train PINN
Train the model using a custom training loop. Update the network parameters using the adamupdate (Deep Learning Toolbox) function. At the end of each iteration, display the training progress.
This training code uses the modelLoss helper function. For more information, see Model Loss Function.
iteration = 0; epoch = 0; learningRate = initialLearnRate; while epoch < numEpochs && ~monitor.Stop epoch = epoch + 1; reset(mbq); while hasdata(mbq) && ~monitor.Stop iteration = iteration + 1; XY = next(mbq); % Evaluate the model loss and gradients using dlfeval. [loss,gradients] = dlfeval(@modelLoss,model,pinn,XY,pdeCoeffs); % Update the network parameters using the adamupdate function. [pinn,averageGrad,averageSqGrad] = ... adamupdate(pinn,gradients,averageGrad, ... averageSqGrad,iteration,learningRate); end % Update learning rate. learningRate = initialLearnRate / (1+learnRateDecay*iteration); % Update the training progress monitor. recordMetrics(monitor,iteration,Loss=loss); updateInfo(monitor,Epoch=epoch + " of " + numEpochs); monitor.Progress = 100 * iteration/numIterations; end
Test PINN
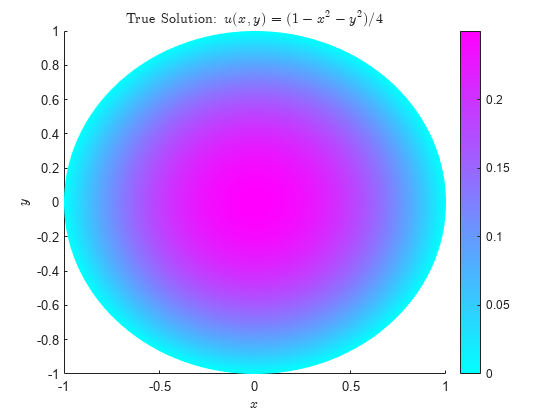
Find and plot the true solution at the mesh nodes.
trueSolution = @(msh) (1-msh.Nodes(1,:).^2-msh.Nodes(2,:).^2)/4; Utrue = trueSolution(msh); figure; pdeplot(model,XYData=Utrue); xlabel('$x$',interpreter='latex') ylabel('$y$',interpreter='latex') zlabel('$u(x,y)$',interpreter='latex') title('True Solution: $u(x,y) = (1-x^2-y^2)/4$', ... interpreter='latex') axis equal
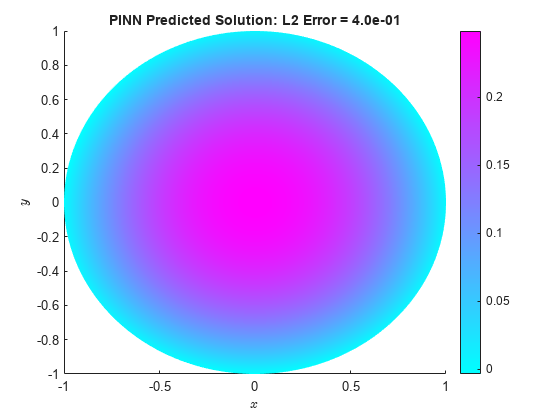
Now find and plot the solution predicted by the PINN.
nodesDLarry = dlarray(msh.Nodes,"CB"); Upinn = gather(extractdata(predict(pinn,nodesDLarry))); figure; pdeplot(model,XYData=Upinn); xlabel('$x$',interpreter='latex') ylabel('$y$',interpreter='latex') zlabel('$u(x,y)$',interpreter='latex') title(sprintf(['PINN Predicted Solution: ' ... 'L2 Error = %0.1e'],norm(Upinn-Utrue))) axis equal
Model Loss Function
The modelLoss helper function takes as inputs a dlnetwork object pinn and a mini-batch of input data XY. The function returns the loss and the gradients of the loss with respect to the learnable parameters in pinn. To compute the gradients automatically, use the dlgradient (Deep Learning Toolbox) function. Train the model by enforcing that, given an input (x,y), the output of the network u(x,y) fulfills the Poisson equation and the boundary conditions.
function [loss,gradients] = modelLoss(model,net,XY,pdeCoeffs) dim = 2; [U,~] = forward(net,XY); % Compute gradients of U and Laplacian of U. gradU = dlgradient(sum(U,"all"),XY,EnableHigherDerivatives=true); Laplacian = 0; for i=1:dim gradU2 = dlgradient(sum(pdeCoeffs.c.*gradU(i,:),"all"), ... XY,EnableHigherDerivatives=true); Laplacian = gradU2(i,:)+Laplacian; end % Enforce PDE. Calculate lossF. res = -pdeCoeffs.f - Laplacian + pdeCoeffs.a.*U; zeroTarget = zeros(size(res),"like",res); lossF = mse(res,zeroTarget); % Enforce boundary conditions. Calculate lossU. actualBC = []; % Boundary information BC_XY = []; % Boundary coordinates % Loop over the boundary edges and find boundary % coordinates and actual BC assigned to PDE model. numBoundaries = model.Geometry.NumEdges; for i=1:numBoundaries BCi = findBoundaryConditions(model.BoundaryConditions,Edge=i); BCiNodes = findNodes(model.Mesh,"region",Edge=i); BC_XY = [BC_XY,model.Mesh.Nodes(:,BCiNodes)]; %#ok<AGROW> actualBCi = ones(1,numel(BCiNodes))*BCi.u; actualBC = [actualBC actualBCi]; %#ok<AGROW> end BC_XY = dlarray(BC_XY,"CB"); % Format the coordinates [predictedBC,~] = forward(net,BC_XY); lossU = mse(predictedBC,actualBC); % Combine the losses. Use a weighted linear combination % of loss (lossF and lossU) terms. lambda = 0.4; % Weighting factor loss = lambda*lossF + (1-lambda)*lossU; % Calculate gradients with respect to the learnable parameters. gradients = dlgradient(loss,net.Learnables); end
See Also
dlarray (Deep Learning Toolbox) | dlfeval (Deep Learning Toolbox) | dlgradient (Deep Learning Toolbox) | adamupdate (Deep Learning Toolbox)
Topics
- Solve PDE Using Fourier Neural Operator (Deep Learning Toolbox)
- Solve PDE Using Physics-Informed Neural Network (Deep Learning Toolbox)
- Solve Heat Equation Using Graph Neural Network