phased.ScenarioViewer
Display motion of radars and targets
Description
The phased.ScenarioViewer
System object™ creates a 3-D viewer to display the motion of radars and targets that you model
in your radar simulation. You can display current positions and velocities, object tracks,
position and speed annotations, radar beam directions, and other object parameters. You can
change radar features such as beam range and beam width during the simulation. You can use the
phased.Platform
System object to model moving objects or you can supply your own dynamic models.
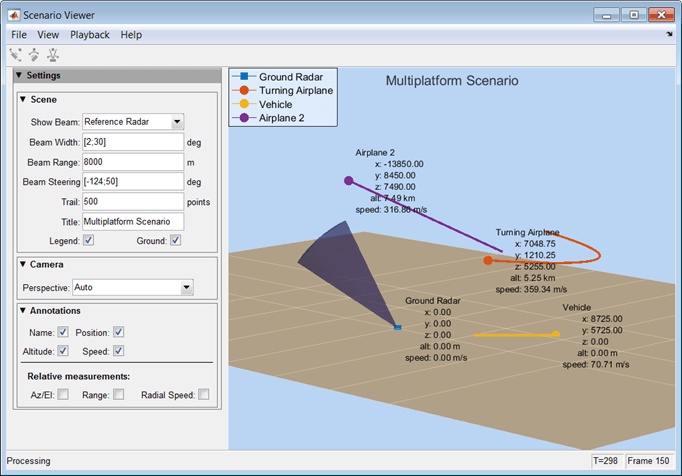
This figure shows a four-object scenario consisting of a ground radar, two airplanes, and a ground vehicle. You can view the code that generated this figure in the Visualize Multiplatform Scenario example.
To run the scenario viewer:
Create the
phased.ScenarioViewerobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
sIS = phased.ScenarioViewersIS having default property values.
sIS = phased.ScenarioViewer(Name=Value)sIS, with any specified property
Name set to a specified Value.
Name must appear inside double quotes (""). You
can specify several name-value pair arguments in any order as
Name1=Value1,...,NameN=ValueN. For example, to specify a beamwidth of
15, set BeamWidth=15.
Properties
Usage
Syntax
Description
sSV(
also specifies the radar velocity, radar_pos,tgt_pos,radar_velocity,tgt_velocity)radar_velocity, and target
velocity, tgt_velocity. This syntax applies when
VelocityInputPort is set to true and
OrientationInputPort is set to false.
sSV(
also specifies the radar orientation axes, radar_pos,radar_laxes,tgt_pos,tgt_laxes)radar_laxes, and the
target orientation axes, tgt_laxes. This syntax applies when
VelocityInputPort is set to false and
OrientationInputPort is set to true.
sSV(
also specifies velocity and orientation axes when radar_pos,radar_velocity,radar_laxes,tgt_pos,tgt_velocity,tgt_laxes)VelocityInputPort
and OrientationInputPort are set to true.
Input Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Visualize the tracks of a radar and a single airplane target. The radar is stationary and the airplane is moving in a straight line. Maintain the radar beam pointing at the airplane.
Create the radar and airplane platform System objects™. Set the update rate to 0.1 s.
updateRate = 0.1; radarPlatform = phased.Platform(... InitialPosition=[0;0;10], ... Velocity=[0;0;0]); airplanePlatforms = phased.Platform(... InitialPosition=[5000.0;3500.0;6000.0], ... Velocity=[-300;0;0]);
Create the phased.ScenarioViewer System object. Show the radar beam and annotate the tracks with position, speed, and altitude.
sSV = phased.ScenarioViewer(BeamRange=5000.0,UpdateRate=updateRate,... PlatformNames={'Ground Radar','Airplane'},ShowPosition=true,... ShowSpeed=true,ShowAltitude=true,ShowLegend=true);
Run the scenario. At each step, compute the angle to the target. Use that angle to steer the radar beam toward the target.
for i = 1:100 [radar_pos,radar_vel] = radarPlatform(updateRate); [tgt_pos,tgt_vel] = airplanePlatforms(updateRate); [rng,ang] = rangeangle(tgt_pos,radar_pos); sSV.BeamSteering = ang; step(sSV,radar_pos,radar_vel,tgt_pos,tgt_vel); pause(0.1); end

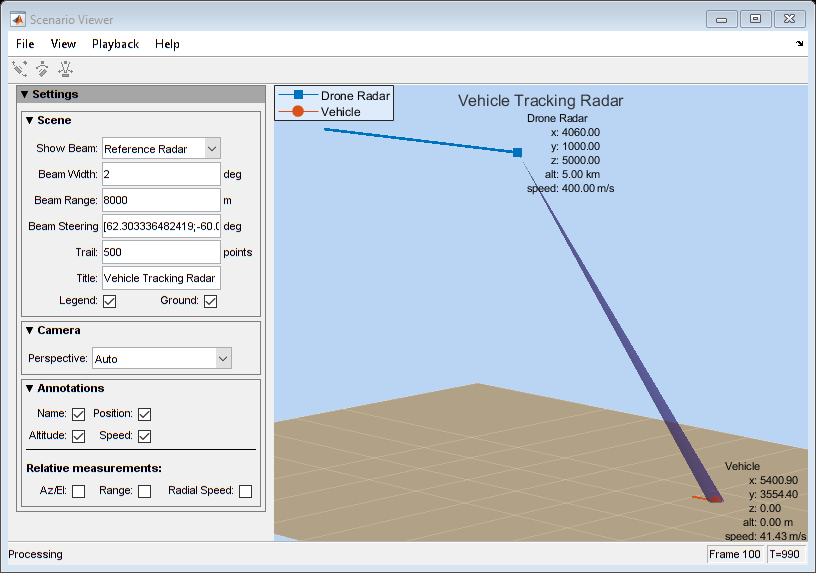
Visualize the tracks of an airborne radar and a ground vehicle target. The airborne radar is carried by a drone flying at an altitude of 5 km.
Create the drone radar and ground vehicle using phased.Platform System objects™. Set the update rate to 0.1 s.
updateRate = 0.1; drone = phased.Platform(... "InitialPosition",[100;1000;5000], ... "Velocity",[400;0;0]); vehicle = phased.Platform(MotionModel="Acceleration", ... InitialPosition=[5000.0;3500.0;0.0],... InitialVelocity=[40;5;0],Acceleration=[0.1;0.1;0]);
Create the phased.ScenarioViewer System object. Show the radar beam and annotate the tracks with position, speed, and altitude.
viewer = phased.ScenarioViewer(BeamRange=8000.0, BeamWidth=2,UpdateRate=updateRate, ... PlatformNames={'Drone Radar','Vehicle'},ShowPosition=true, ... ShowSpeed=true,ShowAltitude=true,ShowLegend=true,Title="Vehicle Tracking Radar");
Run the scenario. At each step, compute the angle to the target. Use that angle to steer the radar beam toward the target.
for i = 1:100 [radar_pos,radar_vel] = drone(updateRate); [tgt_pos,tgt_vel] = vehicle(updateRate); [rng,ang] = rangeangle(tgt_pos,radar_pos); viewer.BeamSteering = ang; viewer(radar_pos,radar_vel,tgt_pos,tgt_vel) pause(.1) end
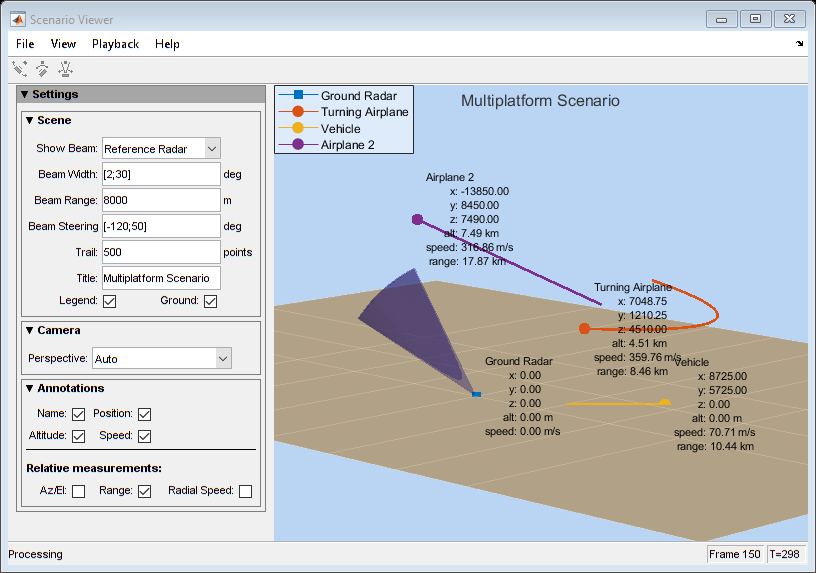
This example shows how to create and display a multiplatform scenario containing a ground-based stationary radar, a turning airplane, a constant-velocity airplane, and a moving ground vehicle. The turning airplane follows a parabolic flight path while descending at a rate of 20 m/s.
Specify the scenario refresh rate at 0.5 Hz. For 150 steps, the time duration of the scenario is 300 s.
updateRate = 0.5; N = 150;
Set up the turning airplane using the Acceleration model of the phased.Platform System object™. Specify the initial position of the airplane by range and azimuth from the ground-based radar and its elevation. The airplane is 10 km from the radar at 60° azimuth and has an altitude of 6 km. The airplane is accelerating at 10 m/s² in the negative x-direction.
airplane1range = 10.0e3; airplane1Azimuth = 60.0; airplane1alt = 6.0e3; airplane1Pos0 = [cosd(airplane1Azimuth)*airplane1range;... sind(airplane1Azimuth)*airplane1range;airplane1alt]; airplane1Vel0 = [400.0;-100.0;-20]; airplane1Accel = [-10.0;0.0;0.0]; airplane1platform = phased.Platform(MotionModel="Acceleration", ... AccelerationSource="Input port",InitialPosition=airplane1Pos0,... InitialVelocity=airplane1Vel0,OrientationAxesOutputPort=true,... InitialOrientationAxes=eye(3));
Set up the stationary ground radar at the origin of the global coordinate system. To simulate a rotating radar, change the ground radar beam steering angle in the processing loop.
groundRadarPos = [0,0,0]'; groundRadarVel = [0,0,0]'; groundradarplatform = phased.Platform(MotionModel="Velocity", ... InitialPosition=groundRadarPos,Velocity=groundRadarVel, ... InitialOrientationAxes=eye(3));
Set up the ground vehicle to move at a constant velocity.
groundVehiclePos = [5e3,2e3,0]'; groundVehicleVel = [50,50,0]'; groundvehicleplatform = phased.Platform(MotionModel="Velocity",... InitialPosition=groundVehiclePos,Velocity=groundVehicleVel,... InitialOrientationAxes=eye(3));
Set up the second airplane to also move at constant velocity.
airplane2Pos = [8.5e3,1e3,6000]'; airplane2Vel = [-300,100,20]'; airplane2platform = phased.Platform(MotionModel="Velocity", ... InitialPosition=airplane2Pos,Velocity=airplane2Vel, ... InitialOrientationAxes=eye(3));
Set up the scenario viewer. Specify the radar as having a beam range of 8 km, a vertical beam width of 30°, and a horizontal beam width of 2°. Annotate the tracks with position, speed, altitude, and range.
BeamSteering = [0;50]; viewer = phased.ScenarioViewer(BeamRange=8.0e3,BeamWidth=[2;30],UpdateRate=updateRate, ... PlatformNames={'Ground Radar','Turning Airplane','Vehicle','Airplane 2'},ShowPosition=true, ... ShowSpeed=true,ShowAltitude=true,ShowLegend=true,ShowRange=true, ... Title="Multiplatform Scenario",BeamSteering=BeamSteering);
Step through the display processing loop, updating radar and target positions. Rotate the ground-based radar steering angle by four degrees at each step.
for n = 1:N [groundRadarPos,groundRadarVel] = groundradarplatform(updateRate); [airplane1Pos,airplane1Vel,airplane1Axes] = airplane1platform(updateRate,airplane1Accel); [vehiclePos,vehicleVel] = groundvehicleplatform(updateRate); [airplane2Pos,airplane2Vel] = airplane2platform(updateRate); viewer(groundRadarPos,groundRadarVel,[airplane1Pos,vehiclePos,airplane2Pos],... [airplane1Vel,vehicleVel,airplane2Vel]); BeamSteering = viewer.BeamSteering(1); BeamSteering = mod(BeamSteering + 4,360.0); if BeamSteering > 180.0 BeamSteering = BeamSteering - 360.0; end viewer.BeamSteering(1) = BeamSteering; pause(0.2); end
Version History
Introduced in R2016a