Bicycle Kinematic Model
Compute car-like vehicle motion using bicycle kinematic model
Libraries:
Robotics System Toolbox /
Mobile Robot Algorithms
Description
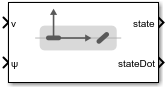
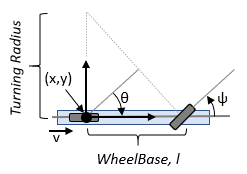
The Bicycle Kinematic Model block creates a bicycle vehicle model to
simulate simplified car-like vehicle dynamics. This model represents a vehicle with two axles
defined by the length between the axles, Wheel base. The
front wheel can be turned with steering angle psi. The
vehicle heading theta is defined at the center of the rear axle.
Examples
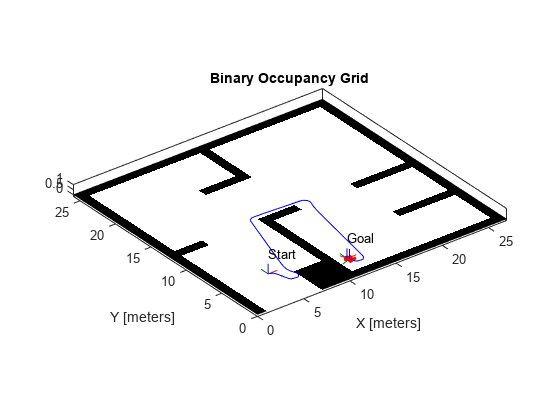
Plan Path for a Bicycle Robot in Simulink
Execute an obstacle-free path with a bicycle robot in Simulink® using probabilistic roadmap (PRM) planning and Pure Pursuit control.
Ports
Input
Output
Parameters
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
[2] Corke, Peter I. Robotics, Vision and Control: Fundamental Algorithms in MATLAB. Springer, 2011.
Extended Capabilities
Version History
Introduced in R2019b