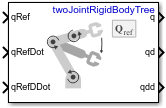
Joint Space Motion Model
Model rigid body tree motion given joint-space inputs
Libraries:
Robotics System Toolbox /
Manipulator Algorithms
Description
The Joint Space Motion Model block models the closed-loop joint-space
motion of a manipulator robot, specified as a rigidBodyTree object. The motion model behavior is defined by the Motion Type
parameter.
For more details about the equations of motion, see Joint-Space Motion Model.
Examples
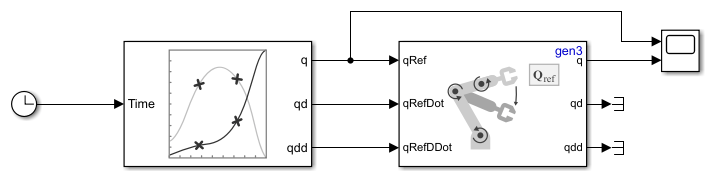
Follow Joint Space Trajectory in Simulink
Use a Task Space Motion Model to follow a task space trajectory in Simulink®.
Ports
Input
n-element vector representing the desired joint positions of
radians, where n is the number of nonfixed joints in the rigidBodyTree object of the Rigid body
tree parameter.
Dependencies
To enable this port, set the Motion
Type parameter to Computed Torque Control,
PD Control, or Independent Joint
Motion.
n-element vector representing the desired joint velocities of
radians per second, where n is the number of nonfixed joints in the
rigidBodyTree object of the Rigid body
tree parameter.
Dependencies
To enable this port, set the Motion
Type parameter to Computed Torque Control,
or Independent Joint Motion.
n-element vector representing the desired joint velocities of
radians per second squared, where n is the number of nonfixed
joints in the rigidBodyTree object of the Rigid body
tree parameter.
Dependencies
To enable this port, set the Motion
Type parameter to Computed Torque Control,
PD Control, or Independent Joint
Motion.
A 6-by-m matrix of external forces for the m
bodies in the rigidBodyTree object of the Rigid body
tree parameter.
Dependencies
To enable this port, set the Show external
force input parameter to on.
Output
Joint positions output as an n-element vector in radians or
meters, where n is the number of nonfixed joints in the rigidBodyTree object of the Rigid body
tree parameter.
Joint velocities output as an n-element vector in radians per
second or meters per second, where n is the number of nonfixed
joints in the rigidBodyTree object of the Rigid body
tree parameter
Joint accelerations output as an n-element vector in radians
per second squared or meters per second squared, where n is the
number of nonfixed joints in the rigidBodyTree object of the Rigid body
tree parameter
Parameters
Robot model, specified as a rigidBodyTree object. You can also import
a robot model from an URDF (Unified Robot Description Formation) file using importrobot.
The default robot model, twoJointRigidBodyTree, is a manipulator
with revolute joints and two degrees of freedom.
Type of motion, specified as a string scalar or character vector that defines the closed-loop joint-space behavior that the object models. Options are:
Computed Torque Control— Compensates for full-body dynamics and assigns the error dynamics specified in theNatural frequencyandDamping ratioparameters.Independent Joint Motion— Models each joint as an independent second order system using the error dynamics specified by theNatural frequencyandDamping ratioparameters.PD Control— Uses proportional-derivative (PD) control on the joints based on the specifiedProportional gainandDerivative gainparameters.Open Loop Dynamics— Disables inputs except forFExtifShow external force inputis enabled. This is an open-loop configuration.
Inputs to control the robot system. Options are:
Damping Ratio / Natural Frequency— Setting the natural frequency using theNatural frequencyparameter of the system in Hz, and the damping ratio using theDamping ratioparameter.Step Response— Model at discrete time-steps with a fixed settling time and overshoot using theSettling timeand theOvershootparameters.
Dependencies
To enable this parameter, set the Motion
Type parameter to Computed Torque Control or
Independent Joint Motion.
Damping ratio use to decay system oscillations. A value of 1
results in no damping, whereas 0 fully dampens the system.
Dependencies
To enable this parameter, set the Specification
format parameter to Damping Ratio / Natural
Frequency.
Frequency of the system oscillations if unimpeded, specified in Hz.
Dependencies
To enable this parameter, set the Specification
format parameter to Damping Ratio / Natural
Frequency.
The time taken for each joint to reach steady state, measured in seconds.
Dependencies
To enable this parameter, set the Specification
format parameter to Step Response.
The maximum value that the system exceeds the target position.
Dependencies
To enable this parameter, set the Specification
format parameter to Step Response.
Proportional gain for proportional-derivative (PD) control, specified as a scalar or
n-by-n matrix, where n is the
number of nonfixed joints in the rigidBodyTree object of the Rigid body
tree parameter.
Dependencies
To enable this parameter, set the Specification
format parameter to PD Control.
Derivative gain for proportional-derivative (PD) control, specified as a scalar or
n-by-n matrix, where n is the
number of nonfixed joints in the rigidBodyTree object of the Rigid body
tree parameter
Dependencies
To enable this parameter, set the Specification
format parameter to PD Control.
Enable this parameter to input external forces using the FExt
port.
Dependencies
To enable this parameter, set the Motion
Type parameter to Computed Torque Control,
PD Control, or Open Loop
Dynamics.
Initial joint positions, specified as a n-element vector or
scalar in radians. n is the number of nonfixed joints in the rigidBodyTree object in the Rigid body
tree parameter.
Initial joint velocities, specified as a n-element vector or
scalar in radians per second. n is the number of nonfixed joints in
the rigidBodyTree object in the Rigid body
tree parameter.
Interpreted execution— Simulate model using the MATLAB® interpreter. For more information, see Interpreted Execution vs. Code Generation (Simulink).Code generation— Simulate model using generated C code. The first time you run a simulation, Simulink generates C code for the block. The C code is reused for subsequent simulations, as long as the model does not change.
Tunable: No
References
[1] Craig, John J. Introduction to Robotics: Mechanics and Control. Upper Saddle River, NJ: Pearson Education, 2005.
[2] Spong, Mark W., Seth Hutchinson, and Mathukumalli Vidyasagar. Robot Modeling and Control. Hoboken, NJ: Wiley, 2006.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2019bJoint Space Motion Model now supports code generation with disabled dynamic memory allocation. For more information about disabling dynamic memory allocation, see Configure Dynamic Memory Allocation Threshold (MATLAB Coder).
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
选择网站
选择网站以获取翻译的可用内容,以及查看当地活动和优惠。根据您的位置,我们建议您选择:。
您也可以从以下列表中选择网站:
如何获得最佳网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他 MathWorks 国家/地区网站并未针对您所在位置的访问进行优化。
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)