binaryOccupancyMap
Description
map = binaryOccupancyMap(scenario,Name=Value)IsBinaryOccupied status true. The mesh elements are
processed in the 3-D convex hull form. Further, mesh element is considered as occupied
region only if it lies inside map height limits and map size. These properties are specified
by one or more name-value pair arguments.
Examples
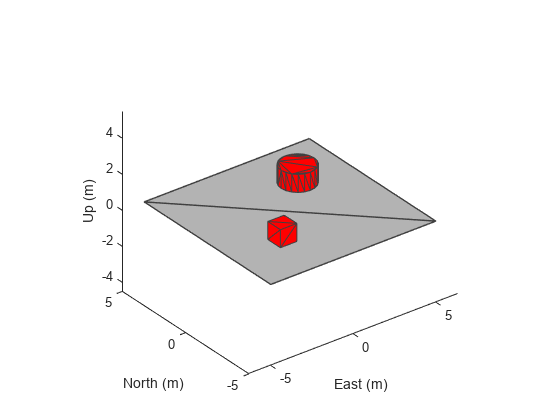
Create a robot scenario.
scenario = robotScenario(UpdateRate=1,StopTime=10);
Add a plane, box and cylinder mesh in the scenario.
addMesh(scenario,"Plane",Size=[10 10],Color=[0.7 0.7 0.7]) addMesh(scenario,"Box",Position=[-2 -2 0.5],IsBinaryOccupied=true) addMesh(scenario,"Cylinder",Position=[2 2 0.5],IsBinaryOccupied=true)
Visualize the scenario.
show3D(scenario);
Get the 2-D occupancy map.
occupancyMap = binaryOccupancyMap(scenario,MapHeightLimits=[-1 1], ...
GridOriginInLocal=[-5 -5]);Visualize the 2-D occupancy map.
figure show(occupancyMap);
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/robotics/win64/Create2DBinaryOccupancyMapFromRobotScenarioExample_02.png)
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022a
See Also
Objects
Functions
addInertialFrame|addMesh|advance|restart|setup|show3D|updateSensors