mixsyn
Mixed-sensitivity H∞ synthesis method for robust control loop-shaping design
Syntax
Description
[
computes a controller that minimizes the H∞
norm of the weighted closed-loop transfer function K,CL,gamma,info] = mixsyn(G,W1,W2,W3)
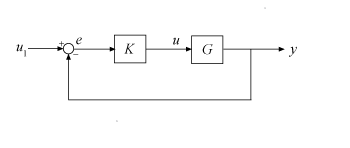
where S = (I + GK)–1 and T = (I – S) is the complementary sensitivity of the following control system.
You choose the weighting functions W1,W2,W3 to shape the frequency
responses for tracking and disturbance rejection, controller effort, and noise reduction and
robustness, respectively. For details about how to choose weighting functions, see Mixed-Sensitivity Loop Shaping.
mixsyn computes the controller K that yields
the minimum ||M(s)||∞, which is
returned as gamma. For the returned controller
K,
[
calculates a controller for the target performance level K,CL,gamma] = mixsyn(G,W1,W2,W3,gamTry)gamTry.
Specifying gamTry can be useful when the optimal controller performance
is better than you need for your application. In that case, a less-than-optimal controller
can have smaller gains and be better conditioned numerically. When
W1,W2,W3 capture the desired limits on the gains of
S, KS, and T, use
gamtry = 1 to just enforce those limits.
If gamTry is not achievable, mixsyn returns
[] for K and CL, and
Inf for gamma.
[
searches the range K,CL,gamma] = mixsyn(G,W1,W2,W3,gamRange)gamRange for the best achievable performance.
Specify the range with a vector of the form [gmin,gmax]. Limiting the
search range can speed up computation by reducing the number of iterations performed by
mixsyn to test different performance levels.
[
specifies additional computation options. To create K,CL,gamma] = mixsyn(___,opts)opts, use hinfsynOptions.
Specify opts after all other input arguments.
Examples
Use mixsyn for sensitivity and complementary sensitivity loop shaping. Create a plant model and weighting functions that:
Shape the sensitivity function for reference tracking and disturbance rejection (
W1 = 1/Slarge inside the control bandwidth).Shape the complementary sensitivity for robustness and noise attenuation (
W3 = 1/Tlarge outside the control bandwidth).Limit the control effort (
W2 = 1/KSlarge inside the control bandwidth).
(For more information about choosing weighting functions, see Mixed-Sensitivity Loop Shaping.)
s = zpk('s');
G = (s-1)/(s+1)^2;
W1 = makeweight(10,[1 0.1],0.01);
W2 = makeweight(0.1,[32 0.32],1);
W3 = makeweight(0.01,[1 0.1],10);
bodemag(W1,W2,W3)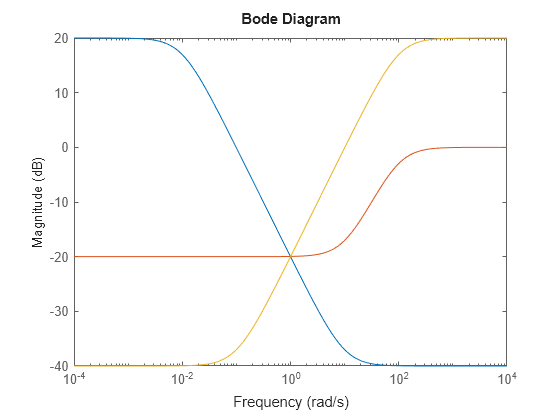
Design the controller.
[K,CL,gamma] = mixsyn(G,W1,W2,W3);
mixsyn shapes the singular values of the sensitivity function S, the complementary sensitivity function T, and the control effort R = K*S. Examine the results of the synthesis and the shapes of these transfer functions.
S = feedback(1,G*K); KS = K*S; T = 1-S; sigma(S,'b',KS,'r',T,'g',gamma/W1,'b-.',ss(gamma/W2),'r-.',gamma/W3,'g-.',{1e-3,1e3}) legend('S','KS','T','GAM/W1','GAM/W2','GAM/W3','Location','SouthWest') grid

Input Arguments
Plant, specified as a dynamic system model such as a state-space
(ss) model. G can be any LTI model.
mixsyn assumes the following control structure.
If G is a generalized state-space model with uncertain or
tunable control design blocks, then mixsyn uses the nominal or
current value of those elements.
Weighting functions, specified as dynamic system models. Choose the weighting functions
W1,W2,W3 to shape the frequency responses for tracking and
disturbance rejection, controller effort, and noise reduction and robustness. Typically:
For good reference-tracking and disturbance-rejection performance, choose
W1large inside the control bandwidth to obtain small S.For robustness and noise attenuation, choose
W3large outside the control bandwidth to obtain small T.To limit control effort in a particular frequency band, increase the magnitude of W2 in this frequency band to obtain small KS.
If one of the weights is not needed, set it to []. For instance, if
you do not want to restrict control effort, use W2 = [].
Use makeweight to create weighting
functions with the desired gain profiles. For details about choosing weighting
functions, see Mixed-Sensitivity Loop Shaping.
If G has NU inputs and
NY outputs, then
W1,W2,W3 must be either SISO or square systems of size
NY,
NU, and
NY, respectively.
Because S + T =
I, mixsyn cannot make both S and
T small (less than 0 dB) in the same frequency range. Therefore,
when you specify weights for loop shaping, there must be a frequency band in which both
W1 and W3 are below 0 dB.
Target performance level, specified as a positive scalar.
mixsyn attempts to compute a controller such that the
H∞ of the weighted closed-loop system
M(s) does not exceed
gamTry. If this performance level is achievable, then the returned
controller has gamma ≤ gamTry. If
gamTry is not achievable, mixsyn returns an
empty controller.
Performance range for search, specified as a vector of the form
[gmin,gmax]. The mixsyn command tests only
performance levels within that range. It returns a controller with performance:
If you know a range of feasible performance levels, specifying this range can speed
up computation by reducing the number of iterations performed by
mixsyn to test different performance levels.
Additional options for the computation, specified as an options object you create
using hinfsynOptions.
Use opts to specify options for the underlying
hinfsyn computation (see Algorithms). Available options
include:
Display algorithm progress at the command line.
Turn off automatic scaling and regularization.
Specify an optimization method.
For information about all options, see hinfsynOptions.
Output Arguments
Algorithms
mixsyn uses your weighting functions to generate an augmented plant
P = augw(G,W1,W2,W3). It then invokes hinfsyn to
find a controller that minimizes the H∞ norm of the
closed-loop transfer function M(s) =
LFT(P,K). For details, see Mixed-Sensitivity Loop Shaping.