hinfsyn
Compute H-infinity optimal controller
Syntax
Description
[
computes a stabilizing H∞-optimal controller
K,CL,gamma] = hinfsyn(P,nmeas,ncont)K for the plant P. The plant has a partitioned
form
where:
w represents the disturbance inputs.
u represents the control inputs.
z represents the error outputs to be kept small.
y represents the measurement outputs provided to the controller.
nmeas and ncont are the number of signals in
y and u, respectively. y and
u are the last outputs and inputs of P,
respectively. hinfsyn returns a controller K that
stabilizes P and has the same number of states. The closed-loop system
CL = lft(P,K) achieves the performance level
gamma, which is the H∞ norm
of CL (see hinfnorm).
[
calculates a controller for the target performance level K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamTry)gamTry.
Specifying gamTry can be useful when the optimal controller performance
is better than you need for your application. In that case, a less-than-optimal controller
can have smaller gains and be more numerically well-conditioned. If
gamTry is not achievable, hinfsyn returns
[] for K and CL, and
Inf for gamma.
[
searches the range K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamRange)gamRange for the best achievable performance.
Specify the range with a vector of the form [gmin,gmax]. Limiting the
search range can speed up computation by reducing the number of iterations performed by
hinfsyn to test different performance levels.
[
specifies additional computation options. To create K,CL,gamma] = hinfsyn(___,opts)opts, use hinfsynOptions.
Specify opts after all other input arguments.
Examples
Synthesize a controller using different target performance levels. The plant in this example is based on the augmented plant model used in Robust Control of Active Suspension. Load the plant.
load hinfsynExData P size(P)
State-space model with 5 outputs, 4 inputs, and 9 states.
This plant has five outputs and four inputs, where the last two outputs are measurement signals to provide to the controller, and the last input is a control signal. Compute an -optimal controller.
ncont = 1; nmeas = 2; [K1,CL,gamma] = hinfsyn(P,nmeas,ncont);
The resulting two-input, one-output controller has the same number of states as P.
size(K1)
State-space model with 1 outputs, 2 inputs, and 9 states.
The optimal performance level achieved by this controller is returned as gamma. This value is the norm of the closed-loop system CL.
gamma
gamma = 0.9405
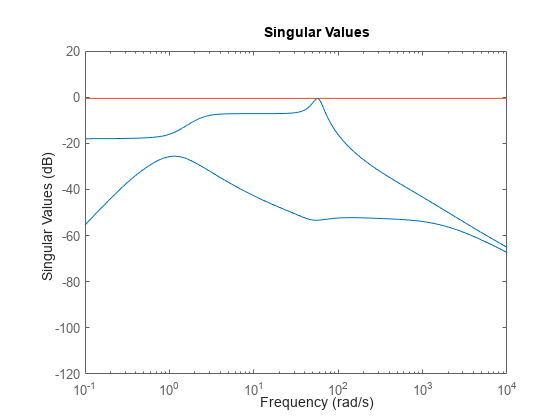
You can examine the singular value plot of the closed-loop system to confirm that its largest singular value does not exceed gamma.
sigma(CL,ss(gamma)) ylim([-120,20]);
For controllers that are close to optimal performance, controller gains can sometimes get large. If you know that your application does not require the optimal achievable performance level, you can limit the range of values that hinfsyn tests. Suppose you know that is good enough for your application. Using the same plant as in the example H-Infinity Controller Synthesis, compute a controller using a target performance range of [1.4,1.6]. Turn on the display to see the progress of the computation.
load hinfsynExData P ncont = 1; nmeas = 2; opts = hinfsynOptions('Display','on'); gamRange = [1.4 1.6]; [K,CL,gamma,info] = hinfsyn(P,nmeas,ncont,gamRange,opts);
Test bounds: 1.4 <= gamma <= 1.6 gamma X>=0 Y>=0 rho(XY)<1 p/f 1.60e+00 4.9e-07 0.0e+00 1.462e-02 p 1.50e+00 5.0e-07 2.7e-20 1.681e-02 p 1.45e+00 5.0e-07 0.0e+00 1.803e-02 p 1.42e+00 5.0e-07 0.0e+00 1.868e-02 p 1.41e+00 5.0e-07 0.0e+00 1.902e-02 p Best performance (actual): 0.946
The display shows all the performance levels tested by hinfsyn. In this case, all tested performance levels pass the tests that hinfsyn applies for closed-loop stability (see Algorithms). Although the smallest tested level is 1.41, the controller returned for that value achieves an actual performance level of gamma, which is about 0.95. The smallest tested level is returned in the gamma field of the info structure.
info.gamma
ans = 1.4117
If you try to obtain a performance level that is not achievable with any controller, the display informs you that the target is too small, and returns an empty controller and closed-loop system. For example, suppose you try to achieve a performance level of 0.75.
gamTry = 0.75
gamTry = 0.7500
[K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamTry,opts)
Specified upper limit GMAX=0.75 is too small, needs to be greater than 0.94.
K =
[]
CL =
[]
gamma = Inf
Design a mixed-sensitivity controller for the following plant, augmented by the following loop-shaping filters (see mixsyn).
Define the plant, weighting filters, and augmented plant.
s = zpk('s');
G = (s-1)/(s+1);
W1 = 0.1*(s+100)/(100*s+1);
W2 = 0.1;
W3 = [];
P = augw(G,W1,W2,W3);Synthesize the controller.
[K,CL,gamma] = hinfsyn(P,1,1); gamma
gamma = 0.1831
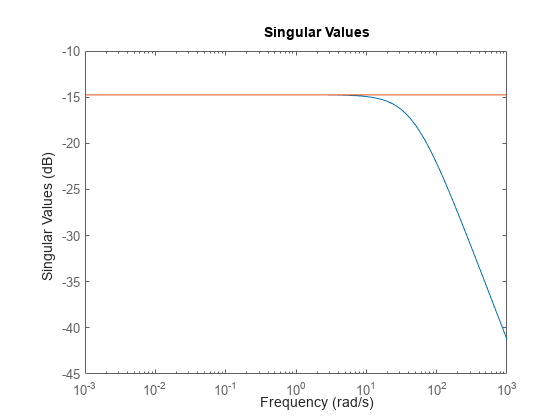
For this system, gamma is about 0.18, or about –15 dB.
Examine the singular values of the closed-loop result.
sigma(CL,ss(gamma))
Compute a new controller for the same system with no .
W1 = []; P = augw(G,W1,W2,W3); [K,CL,gamma] = hinfsyn(P,1,1);
In this case, the resulting controller K is zero, and the closed-loop transfer function CL = K*(1+G*K) is also zero.
Input Arguments
Output Arguments
Closed-loop transfer function, returned as a state-space (ss) model
object or []. The closed-loop transfer function is given by
CL = lft(P,K) as in the following diagram.
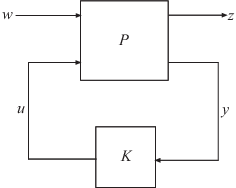
The returned performance level gamma is the
H∞ norm of CL.
If you supply gamTry or gamRange and the
specified performance levels are not achievable, then CL =
[].
Controller performance, returned as a nonnegative scalar value or
Inf. This value is the performance achieved using the returned
controller K, and is the
H∞ norm of CL (see
hinfnorm). If you do not provide
performance levels to test using gamTry or
gamRange, then gamma is the best achievable
performance level.
If you provide gamTry or gamRange, then
gamma is the actual performance level achieved by the controller
computed for the best passing performance level that hinfsyn tries.
If the specified performance levels are not achievable, then gamma
= Inf.
Additional synthesis data, returned as a structure or [] (if the
specified performance level is not achievable). For the default Riccati-based synthesis
method, info has the following fields.
| Field | Description |
|---|---|
gamma | Performance level used to compute the controller
|
X,Y | Riccati solutions X∞ and
Y∞ for the performance level
|
Ku,Kw | State feedback gains of controller |
Lx,Lu | Observer gains of controller |
Preg | Regularized plant used for |
AS | All-solutions controller parameterization, returned as a state-space
( |
For the LMI-based synthesis method, info contains the best
performance gamma and the corresponding LMI solutions
R and S. (Use hinfsynOptions to change the synthesis method.)
More About
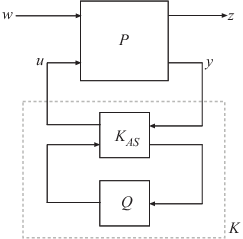
In general, the solution to the infinity-norm optimal control problem
is nonunique. The controller returned by hinfsyn is only one particular
solution, K. For the default Riccati-based method,
info.AS contains the all-solution controller parameterization
KAS. All solutions with
closed-loop performance of γ or less are parameterized by a free stable
contraction map Q, which is constrained by .
In other words, the solutions include every stabilizing controller K(s) that makes
Here, is the closed-loop transfer function CL. These
controllers K(s) are given by:
Ks = lft(info.AS,Q)
where Q is a stable LTI system satisfying norm(Q,Inf) <
info.gamma.
Tips
hinfsyngives you state-feedback gains and observer gains that you can use to express the controller in observer form. The observer form of the controllerKis:Here, we is an estimate of the worst-case perturbation and the innovation term e is given by:
hinfsynreturns the state-feedback gains Ku and Kw and the observer gains Lx and Lu as fields in theinfooutput argument.You can use this form of the controller for gain scheduling in Simulink®. To do so, tabulate the plant matrices and the controller gain matrices as a function of the scheduling variables using the Matrix Interpolation (Simulink) block. Then, use the observer form of the controller to update the controller variables as the scheduling variables change.
Algorithms
By default, hinfsyn uses the two-Riccati formulae
([1],[2]) with loop shifting
[3]. You can use
hinfsynOptions to change to an LMI-based method
([4],[5],[6]). You can also
specify a maximum-entropy method. In that method, hinfsyn returns the
H∞ controller that maximizes an entropy
integral relating to the point S0. For continuous-time systems, this
integral is:
where is the closed-loop transfer function CL. A similar
integral is used for discrete-time systems.
For all methods, the function uses a standard γ-iteration technique to determine the optimal value of the performance level γ. γ-iteration is a bisection algorithm that starts with high and low estimates of γ and iterates on γ values to approach the optimal H∞ control design.
At each value of γ, the algorithm tests a γ value to
determine whether a solution exists. In the Riccati-based method, the algorithm computes the
smallest performance level for which the stabilizing Riccati solutions X =
X∞/γ and Y =
Y∞/γ exist. For any γ greater than that performance level and
in the range gamRange, the algorithm evaluates the central controller
formulas (K formulas) and checks the closed-loop stability of CL =
lft(P,K). This step is equivalent to verifying the conditions:
min(eig(X)) ≥ 0min(eig(Y)) ≥ 0rho(XY)< 1, where the spectral radiusrho(XY) = max(abs(eig(XY)))
A γ that meets these conditions passes. The
stopping criterion for the bisection algorithm requires the relative difference between the
last γ value that failed and the last γ value that
passed be less than 0.01. (You can change this criterion using
hinfsynOptions.) hinfsyn returns the controller
corresponding to the smallest tested γ value that passes. For discrete-time
controllers, the algorithm performs additional computations to construct the feedthrough
matrix DK.
Use the Display option of hinfsynOptions to make
hinfsyn display values showing which of the conditions are satisfied
for each γ value tested.
The algorithm works best when the following conditions are satisfied by the plant:
D12 and D21 have full rank.
has full column rank for all ω ∊ R.
has full row rank for all ω ∊ R.
When these rank conditions do not hold, the controller may have undesirable properties. If
D12 and
D21 are not full rank, then the
H∞ controller K might
have large high-frequency gain. If either of the latter two rank conditions does not hold at
some frequency ω, the controller might have very lightly damped poles near
that frequency.
References
[1] Glover, K., and J.C. Doyle. "State-space formulae for all stabilizing controllers that satisfy an H∞ norm bound and relations to risk sensitivity." Systems & Control Letters, Vol. 11, Number 8, 1988, pp. 167–172.
[2] Doyle, J.C., K. Glover, P. Khargonekar, and B. Francis. "State-space solutions to standard H2 and H∞ control problems." IEEE Transactions on Automatic Control, Vol 34, Number 8, August 1989, pp. 831–847.
[3] Safonov, M.G., D.J.N. Limebeer, and R.Y. Chiang. "Simplifying the H∞ Theory via Loop Shifting, Matrix Pencil and Descriptor Concepts." Int. J. Contr., Vol. 50, Number 6, 1989, pp. 2467-2488.
[4] Packard, A., K. Zhou, P. Pandey, J. Leonhardson, and G. Balas. "Optimal, constant I/O similarity scaling for full-information and state-feedback problems." Systems & Control Letters, Vol. 19, Number 4, 1992, pp. 271–280.
[5] Gahinet, P., and P. Apkarian. "A linear matrix inequality approach to H∞-control." Int. J. Robust and Nonlinear Control, Vol. 4, Number. 4, 1994, pp. 421–448.
[6] Iwasaki, T., and R.E. Skelton. "All controllers for the general H∞-control problem: LMI existence conditions and state space formulas." Automatica, Vol. 30, Number 8, 1994, pp. 1307–1317.