Gimbal
Gimbal object belonging to satellite scenario
Description
The Gimbal defines a gimbal object belonging to a satellite
scenario.
Creation
You can create a Gimbal object using the gimbal object function of
the Satellite, Platform, or GroundStation.
Properties
Object Functions
aer | Calculate azimuth angle, elevation angle, and range of another satellite or ground station in NED frame |
conicalSensor | Add conical sensor to satellite scenario |
gimbalAngles | Steering angles of gimbal |
pointAt | Point satellite at target |
coordinateAxes | Visualize coordinate axes triad of satellite scenario assets |
receiver | Add receiver to satellite scenario |
transmitter | Add transmitter to satellite scenario |
show | Show object in satellite scenario viewer |
Examples
Create a satellite scenario with a start time of 15-June-2021 8:55:00 AM UTC and a stop time of five days later. Set the simulation sample time to 60 seconds.
startTime = datetime(2021,6,21,8,55,0);
stopTime = startTime + days(5);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime)sc =
satelliteScenario with properties:
StartTime: 21-Jun-2021 08:55:00
StopTime: 26-Jun-2021 08:55:00
SampleTime: 60
AutoSimulate: 1
Satellites: [1×0 matlabshared.satellitescenario.Satellite]
GroundStations: [1×0 matlabshared.satellitescenario.GroundStation]
Platforms: [1×0 matlabshared.satellitescenario.Platform]
Viewers: [0×0 matlabshared.satellitescenario.Viewer]
AutoShow: 1
Add a satellite to the scenario using Keplerian orbital elements.
semiMajorAxis = 7878137; % meters eccentricity = 0; inclination = 50; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 50; % degrees sat = satellite(sc,semiMajorAxis,eccentricity,inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly)
sat =
Satellite with properties:
Name: Satellite 1
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Orbit: [1x1 matlabshared.satellitescenario.Orbit]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
OrbitPropagator: sgp4
MarkerColor: [0.059 1 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Visual3DModel:
Visual3DModelScale: 1
Add a ground station, which represents the location to be photographed, to the scenario.
gs = groundStation(sc,Name="Location to Photograph", ... Latitude=42.3001,Longitude=-71.3504) % degrees
gs =
GroundStation with properties:
Name: Location to Photograph
ID: 2
Latitude: 42.3001 degrees
Longitude: -71.3504 degrees
Altitude: 0 meters
MinElevationAngle: 0 degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
MarkerColor: [1 0.4118 0.1608]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Add a gimbal to the satellite. You can steer this gimbal independently of the satellite.
g = gimbal(sat)
g =
Gimbal with properties:
Name: Gimbal 3
ID: 3
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Track the location to be photographed using the gimbal.
pointAt(g,gs);
Add a conical sensor to the gimbal. This sensor represents the camera. Set the field of view to 60 degrees.
camSensor = conicalSensor(g,MaxViewAngle=60)
camSensor =
ConicalSensor with properties:
Name: Conical sensor 4
ID: 4
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
MaxViewAngle: 60 degrees
Accesses: [1x0 matlabshared.satellitescenario.Access]
FieldOfView: [0x0 matlabshared.satellitescenario.FieldOfView]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Add access analysis to the conical sensor between the camera and the location to be photographed.
ac = access(camSensor,gs)
ac =
Access with properties:
Sequence: [4 2]
LineWidth: 3
LineColor: [0.3922 0.8314 0.0745]
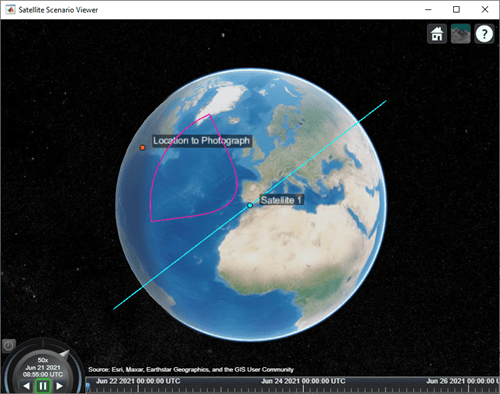
Visualize the field of view of the camera by using the Satellite Scenario Viewer.
v = satelliteScenarioViewer(sc); fieldOfView(camSensor);
Determine the intervals during which the camera can see the geographical site.
t = accessIntervals(ac)
t=35×8 table
"Conical sensor 4" "Location to Photograph" 1 21-Jun-2021 10:38:00 21-Jun-2021 10:55:00 1020 1 2
"Conical sensor 4" "Location to Photograph" 2 21-Jun-2021 12:36:00 21-Jun-2021 12:58:00 1320 2 3
"Conical sensor 4" "Location to Photograph" 3 21-Jun-2021 14:37:00 21-Jun-2021 15:01:00 1440 3 4
"Conical sensor 4" "Location to Photograph" 4 21-Jun-2021 16:41:00 21-Jun-2021 17:04:00 1380 5 5
"Conical sensor 4" "Location to Photograph" 5 21-Jun-2021 18:44:00 21-Jun-2021 19:07:00 1380 6 6
"Conical sensor 4" "Location to Photograph" 6 21-Jun-2021 20:46:00 21-Jun-2021 21:08:00 1320 7 7
"Conical sensor 4" "Location to Photograph" 7 21-Jun-2021 22:50:00 21-Jun-2021 23:04:00 840 8 8
"Conical sensor 4" "Location to Photograph" 8 22-Jun-2021 09:51:00 22-Jun-2021 10:02:00 660 13 13
"Conical sensor 4" "Location to Photograph" 9 22-Jun-2021 11:46:00 22-Jun-2021 12:07:00 1260 14 15
"Conical sensor 4" "Location to Photograph" 10 22-Jun-2021 13:46:00 22-Jun-2021 14:10:00 1440 15 16
"Conical sensor 4" "Location to Photograph" 11 22-Jun-2021 15:49:00 22-Jun-2021 16:13:00 1440 16 17
"Conical sensor 4" "Location to Photograph" 12 22-Jun-2021 17:53:00 22-Jun-2021 18:16:00 1380 18 18
"Conical sensor 4" "Location to Photograph" 13 22-Jun-2021 19:55:00 22-Jun-2021 20:18:00 1380 19 19
"Conical sensor 4" "Location to Photograph" 14 22-Jun-2021 21:58:00 22-Jun-2021 22:16:00 1080 20 20
⋮
Calculate the maximum revisit time in hours.
startTimes = t.StartTime;
endTimes = t.EndTime;
revisitTimes = hours(startTimes(2:end) - endTimes(1:end-1));
maxRevisitTime = max(revisitTimes) % hoursmaxRevisitTime = 12.666666666666666
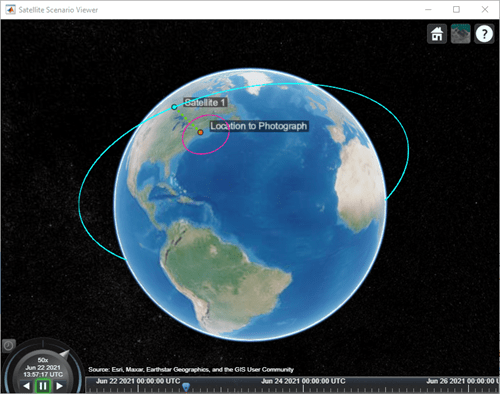
Visualize the revisit times that the camera photographs of the location.
play(sc);
Version History
Introduced in R2021a
See Also
Objects
Functions
show|play|hide|satellite|access|groundStation|conicalSensor|platform|transmitter|receiver