p681LMSChannel
Filter input signal through ITU-R P.681 LMS frequency-flat fading channel
Since R2022a
Description
The p681LMSChannel
System object™ filters a real or complex input signal through a frequency-flat fading land
mobile-satellite (LMS) communication channel, as defined in these recommendations.
For details, refer to More About.
To filter an input signal through a P.681-11 LMS time-varying channel:
Create the
p681LMSChannelobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
chan = p681LMSChannel
The default System object has the environment set to an urban scenario, with carrier frequency of 2.2 GHz and an elevation angle of 45 degrees. This object models a single geostationary satellite.
chan = p681LMSChannel(Name=Value)SampleRate=20e3 sets the input
signal sample rate to 20e3.
Properties
Usage
Description
[
produces path gains, pathgains,sampletimes,stateseries] = chan()pathgains, sample times,
sampletimes, and state series, stateseries for
an ITU-R P.681 LMS flat fading channel.
In this case, the System object acts as a source of path gains, sample times, and state series.
Specify the duration of the fading process by using the NumSamples property. Specify the datatype of outputs using the OutputDataType property.
Note
This syntax is applicable when you set the ChannelFiltering property to false.
[
filters the input signal, y,pathgains,sampletimes,stateseries] = chan(x)x, through an ITU-R P.681 LMS flat fading
channel, and returns the output channel-impaired signal in y, in
addition to the outputs in the previous syntax.
Note
This syntax is applicable when you set the ChannelFiltering property to true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create and Configure the Channel
Create an ITU-R P.681-11 LMS channel and configure it for a suburban scenario with a carrier frequency of 20 GHz and an elevation angle of 50 degrees. Set the sample rate to 6000 kHz.
Specify the mobile terminal speed to 50 m/s, with an azimuth orientation of 20 degrees.
chan = p681LMSChannel; chan.SampleRate = 6e6; % Hz chan.CarrierFrequency = 20e9; % Hz chan.ElevationAngle = 50; % degrees chan.Environment = "Suburban"; chan.MobileSpeed = 50; % m/s chan.AzimuthOrientation = 20; % degrees
Display the channel characteristics.
disp(chan)
p681LMSChannel with properties:
NumStates: 2
SampleRate: 6000000
InitialState: "Good"
CarrierFrequency: 2.0000e+10
ElevationAngle: 50
MobileSpeed: 50
AzimuthOrientation: 20
SatelliteDopplerShift: 0
Environment: "Suburban"
ChannelFiltering: true
Show all properties
Transmit Input Signal Through Channel
Set the random number generation seed as default.
rng("default")Generate a random QPSK-modulated input signal.
numSamples = 6e6;
txWaveform = pskmod(randi([0 3],numSamples,1),4); % Modulation order = 4Filter the signal through the channel.
[rxWaveform,pathGains,sampleTimes,stateSeries] = chan(txWaveform);
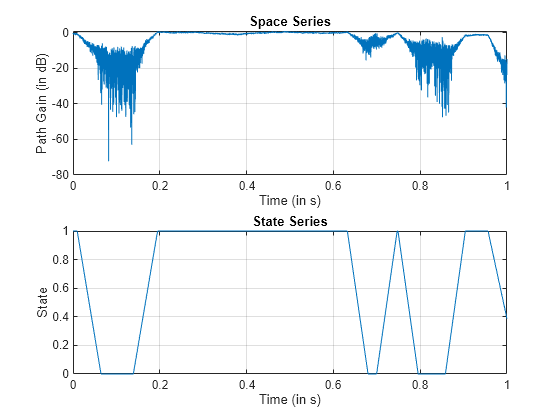
Visualize Space Series and State Series
Plot the space series as a function of time.
figure % Create figure window subplot(2,1,1) plot(sampleTimes,20*log10(abs(pathGains))) title("Space Series") xlabel("Time (in s)") ylabel("Path Gain (in dB)") grid on
Plot the state series as a function of time.
subplot(2,1,2) plot(sampleTimes,stateSeries) title("State Series") xlabel("Time (in s)") ylabel("State") grid on
Define the channel configuration using a p681LMSChannel System object and specify its properties.
Set the number of channel states to 3, visualization as Doppler spectrum, and disable the channel filtering.
chan = p681LMSChannel; chan.NumStates = 3; chan.SampleRate = 450000; % Hz chan.InitialState = "Moderate"; chan.CarrierFrequency = 11e9; % Hz chan.ElevationAngle = 50; % degrees chan.MobileSpeed = 20; % m/s chan.SatelliteDopplerShift = 25e2; % Hz chan.Visualization = "Doppler spectrum"; chan.ChannelFiltering = false; chan.NumSamples = 4e7;
Display the channel characteristics.
disp(chan)
p681LMSChannel with properties:
NumStates: 3
SampleRate: 450000
InitialState: "Moderate"
CarrierFrequency: 1.1000e+10
ElevationAngle: 50
MobileSpeed: 20
AzimuthOrientation: 0
SatelliteDopplerShift: 2500
StateDistribution: [2×3 double]
DirectPathDistribution: [2×1 double]
MultipathPower: [-14 -15 -20]
DirectPathCorrelationDistance: 3.2293
StateTransitionMatrix: [3×3 double]
ChannelFiltering: false
NumSamples: 40000000
OutputDataType: "double"
Show all properties
Get the path gains, sample times, and state series of the channel. Also, observe the Doppler spectrum.
[pathGains,sampleTimes,stateSeries] = chan();

Get channel information from a p681LMSChannel System object by using the info object function.
Create an ITU-R P.681-11 LMS channel System object and specify its properties.
chan = p681LMSChannel; chan.SampleRate = 10e3; % Hz chan.MobileSpeed = 2; % m/s chan.Environment = "RuralWooded"; disp(chan)
p681LMSChannel with properties:
NumStates: 2
SampleRate: 10000
InitialState: "Good"
CarrierFrequency: 2.2000e+09
ElevationAngle: 45
MobileSpeed: 2
AzimuthOrientation: 0
SatelliteDopplerShift: 0
Environment: "RuralWooded"
ChannelFiltering: true
Show all properties
QPSK-modulate a random input signal, and then pass it through the channel.
numSamples = 2e4; txWaveform = pskmod(randi([0 3],numSamples,1),4); [rxWaveform,pathGains,sampleTimes,stateSeries] = chan(txWaveform);
Get the characteristic information about the P.681-11 LMS channel.
info(chan)
ans = struct with fields:
PathDelays: 0
ChannelFilterDelay: 0
ChannelFilterCoefficients: 1
NumSamplesProcessed: 20000
Transmit another QPSK-modulated random input signal through the channel.
numSamples2 = 3e4; txWaveform2 = pskmod(randi([0 3],numSamples2,1),4); [rxWaveform2,pathGains2,sampleTimes2,stateSeries2] = chan(txWaveform2);
Observe the change in number of samples processed.
info(chan)
ans = struct with fields:
PathDelays: 0
ChannelFilterDelay: 0
ChannelFilterCoefficients: 1
NumSamplesProcessed: 50000
More About
To estimate the performance of a LMS receiver, you must perform stochastic synthesis of realistic time series of the channel complex envelope. Use the semi-Markov enhanced 2-state model to simulate the LMS time-variations of the channel for a single geosynchronous satellite.
The figure shows a Loo time series generator which you can use to produce complex signal
variations. The parameters of the circuit update for the generations of time series in each
state. Inside a transition, the Loo parameters drawn for the Good and
Bad states around the transition are interpolated linearly in
dB.
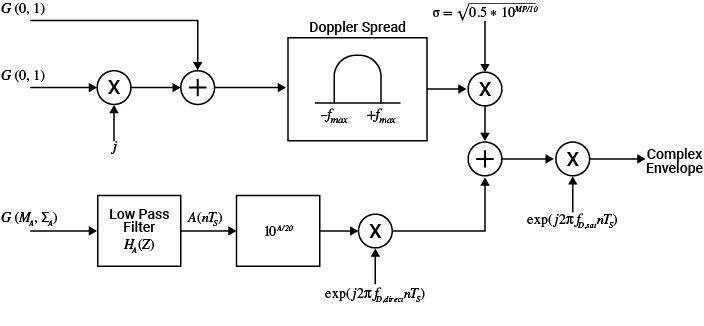
The upper half of the block diagram generates the multipath fast variations. The lower half shows the direct signal slow variations.
Generate multipath fast variations — In the upper half of the block diagram, the two zero-mean and unit-standard deviation Gaussian series in quadrature are passed through a unit-energy Doppler filter. Fast variations are ruled by the Doppler spread mainly due to the motion of the mobile terminal. You can use a Jakes model to generate the fast variations. This expression defines the Jakes filter:
for -fm < f < +fm
S(f) = 0 for -fm > f > +fm
After the Doppler spread, the resultant complex series is multiplied by σ, where 2σ2 is the mean square value of the multipath variations
Generate direct signal slow variations — The lower rail simulates the amplitude and phase variations of the direct signal. In the first step, generate a Gaussian distribution with mean MA (dB) and standard deviation ΣA (dB). In the second step, the series, in dB units, is converted to linear units. In the third step, introduce the phase variations in the direct signal. These are assumed to be linearly varying giving rise to a constant Doppler spectral line that depends on the relative mobile-satellite velocity and the angle of arrival, azimuth and elevation, with respect to the mobile trajectory.
The direct signal's amplitude is subjected to variations slower than those due to multipath caused by shadowing. In this implementation, the rate of change of the slow variations is characterized by the DirectPathCorrelationDistance property value, Lcorr. The sampling distance of the multipath being vmTs, generate the correlated shadowing time series by using this numerical low pass filter:
, where
vm is the speed of the mobile terminal, specified by the MobileSpeed property.
Ts is the sample time, given by 1/SampleRate property.
Generate Doppler variations due to satellite movement — Multipath fast variations and direct signal slow variations combine to form a complex envelope due to scattering environment and mobile movement. The complex envelope introduces variations in signal due to satellite movement, thereby forming the channel output.
The block diagram show these variables for Doppler variations:
fmax denotes the maximum Doppler spread due to mobile movement and is given by the following formula:
fmax = Fmob_max_spread = (vmob*fc) / c
where:
vmob is the speed of the mobile terminal on Earth in m/s, specified as the MobileSpeed property.
fc is the carrier frequency in Hz, specified by the CarrierFrequency property.
c is the speed of light in free space in m/s, specified as
physconst('lightspeed').
fD,direct is the Doppler shift due to mobile movement and is given by the following formula:
fD,direct = fdmob = Fmob_max_spread *
cosd(θ) *cosd(φ)where:
Fmob_max_spread is the maximum Doppler spread due to mobile movement.
θ is the path elevation angle to the satellite in degrees, specified by the ElevationAngle property.
φ is the azimuth orientation in degrees, specified by the AzimuthOrientation property.
fD,sat is the Doppler shift due to satellite movement, specified by the SatelliteDopplerShift property.
References
[1] ITU-R Recommendation P.681-11 (08/2019). “Propagation data required for the design systems in the land mobile-satellite service.” P Series; Radiowave propagation.
[2] ITU-R Recommendation P.681-7 (10/2009). “Propagation data required for the design of Earth-space land mobile telecommunication systems.” P Series; Radiowave propagation.